АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ И РЕГУЛИРОВАНИЕ. Автоматическое регулированиепринцип работы, схемы и т.д.Автоматическое регулирование — это управление технологическими процессами при помощи продвинутых устройств с заранее определенными алгоритмами. В быту, например, автоматическое регулирование может осуществляться при помощи термостата, который измеряет и поддерживает комнатную температуру на заданном уровне.  Автоматическое регулированиеРекомендуем обратить внимание и на другие приборы для регулирования технологических процессов. Автоматическое регулированиеРекомендуем обратить внимание и на другие приборы для регулирования технологических процессов. После того, как желательная температура задана, термостат автоматически контролирует комнатную температуру и включает или отключает нагреватель или воздушный кондиционер по мере необходимости, чтобы поддержать заданную температуру. На производстве управление процессами обычно осуществляется средствами КИП и А, которые измеряют и поддерживают на необходимом уровне технологические параметры процесса, такие как: температура, давление, уровень и расход. Ручное регулирование на более-менее масштабном производстве затруднительно по ряду причин, а многие процессы вообще невозможно регулировать вручную. Технологические процессы и переменные процессаДля нормального выполнения технологических процессов необходимо контролировать физические условия их протекания. Такие физические параметры, как температура, давление, уровень и расход могут изменяться по многим причинам, и их изменения влияют на технологический процесс. Эти изменяемые физические условия называются «переменными процесса». Некоторые из них могут понизить эффективность производства и увеличить производственные затраты. Задачей системы автоматического регулирования является минимизация производственных потерь и затрат на регулирование, связанных с произвольным изменением переменных процесса. На любом производстве осуществляется воздействие на сырьё и другие исходные компоненты для получения целевого продукта. Эффективность и экономичность работы любого производства зависит от того, как технологические процессы и переменные процесса управляются посредством специальных систем регулирования. На тепловой электростанции, работающей на угле, уголь размалывается и затем сжигается, чтобы произвести тепло, необходимое для преобразования воды в пар. Пар может использоваться по множеству назначений: для работы паровых турбин, тепловой обработки или сушки сырых материалов. Ряд операций, которые эти материалы и вещества проходят, называется «технологическим процессом». Слово «процесс» также часто используется по отношению к индивидуальным операциям. Например, операция по размолу угля или превращения воды в пар могла бы называться процессом. Принцип работы и элементы системы автоматического регулированияВ случае системы автоматического регулирования наблюдение и регулирование производится автоматически при помощи заранее настроенных приборов. Аппаратура способна выполнять все действия быстрее и точнее, чем в случае ручного регулирования. Действие системы может быть разделено на две части: система определяет изменение значения переменной процесса и затем производит корректирующее воздействие, вынуждающее переменную процесса вернуться к заданному значению. Система автоматического регулирования содержит четыре основных элемента: первичный элемент, измерительный элемент, регулирующий элемент и конечный элемент. 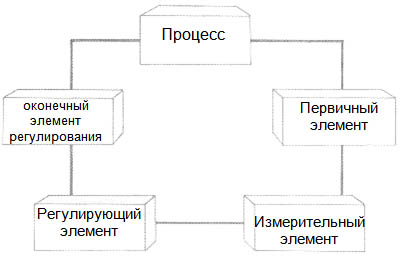 Элементы системы автоматического регулирования Элементы системы автоматического регулированияПервичный элемент воспринимает величину переменной процесса и превращает его в физическую величину, которое передается в измерительный элемент. Измерительный элемент преобразовывает физическое изменение, произведенное первичным элементом, в сигнал, представляющий величину переменной процесса. Выходной сигнал от измерительного элемента посылается к регулирующему элементу. Регулирующий элемент сравнивает сигнал от измерительного элемента с опорным сигналом, который представляет собой заданное значение и вычисляет разницу между этими двумя сигналами. Затем регулирующий элемент производит корректирующий сигнал, который представляет собой разницу между действительной величиной переменной процесса и ее заданным значением. Выходной сигнал от регулирующего элемента посылается к конечному элементу регулирования. Конечный элемент регулирования преобразовывает получаемый им сигнал в корректирующее воздействие, которое вынуждает переменную процесса возвратиться к заданному значению. В дополнение к четырем основным элементам, системы регулирования процессами могут иметь вспомогательное оборудование, которое обеспечивает информацией о величине переменной процесса. Это оборудование может включать такие приборы как самописцы, измерители и устройства сигнализации. 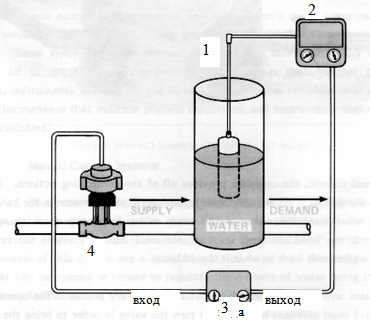 Схема простой системы автоматического регулирования Схема простой системы автоматического регулированияВиды систем автоматического регулированияИмеются два основных вида автоматических систем регулирования: замкнутые и разомкнутые, которые различаются по своим характеристикам и следовательно — по уместности применения. Замкнутая система автоматического регулированияВ замкнутой системе информация о значении регулируемой переменной процесса проходит через всю цепочку приборов и устройств, предназначенных для контроля и регулирования этой переменной. Таким образом, в замкнутой системе производится постоянное измерение регулируемой величины, её сравнение с задающей величиной и оказывается соответствующее воздействие на процесс для приведения регулируемой величины в соответствие с задающей величиной. 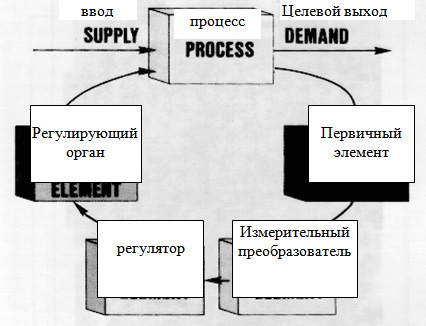 Схема замкнутой системы автоматического регулирования Схема замкнутой системы автоматического регулированияНапример, подобная система хорошо подходит для контроля и поддержания необходимого уровня жидкости в резервуаре. Буек воспринимает изменение уровня жидкости. Измерительный преобразователь преобразует изменения уровня в сигнал, который отправляет на регулятор. Который, в свою очередь, сравнивает полученный сигнал с необходимым уровнем, заданным заранее. После регулятор вырабатывает корректирующий сигнал и отправляет его на регулирующий клапан, который корректирует поток воды. Разомкнутая система автоматического регулированияВ разомкнутой системе нет замкнутой цепочки измерительных и обрабатывающих сигнал приборов и устройств от выхода до входа процесса, и воздействие регулятора на процесс не зависит от результирующего значения регулируемой переменной. Здесь не производится сравнение между текущим и желаемым значением переменной процесса и не вырабатывается корректирующее воздействие.  Схема разомкнутой системы автоматического регулирования Схема разомкнутой системы автоматического регулированияОдин из примеров разомкнутой системы регулирования — автоматическая мойка автомобилей. Это технологический процесс по мойке автомобилей и все необходимые операции чётко определены. Когда автомобиль выходит с мойки предполагается, что он должен быть чистым. Если автомобиль недостаточно чист, то система этого не обнаруживает. Здесь нет никакого элемента, который бы давал информацию об этом и корректировал процесс. На производстве некоторые разомкнутые системы используют таймеры, чтобы гарантировать, что ряд последовательных операций выполнен. Этот вид разомкнутого регулирования может быть приемлем, если процесс не очень ответственный. Однако, если процесс требует, чтобы выполнение некоторых условий было проверено и при необходимости были бы сделаны корректировки, разомкнутая система не приемлема. В таких ситуациях необходимо применить замкнутую систему. Методы автоматического регулированияСистемы автоматического регулирования могут создаваться на основе двух основных методов регулирования: регулирования с обратной связью, которое работает путем исправления отклонений переменной процесса после того, как они произошли; и с воздействием по возмущению, которое предотвращает возникновение отклонений переменной процесса. Регулирование с обратной связьюРегулирование с обратной связью — это такой способ автоматического регулирования, когда измеренное значение переменной процесса сравнивается с ее уставкой срабатывания и предпринимаются действия для исправления любого отклонения переменной от заданного значения.  Система ручного регулирования с обратной связью Система ручного регулирования с обратной связьюОсновным недостатком системы регулирования с обратной связью является то, что она не начинает регулировки процесса до тех пор, пока не произойдет отклонение регулируемой переменной процесса от значения ее уставки. Температура должна измениться, прежде чем регулирующая система начнет открывать или закрывать управляющий клапан на линии пара. В большинстве систем регулирования такой тип регулирующего действия приемлем и заложен в конструкцию системы. В некоторых промышленных процессах, таких как изготовление лекарственных препаратов, нельзя допустить отклонение переменной процесса от значения уставки. Любое отклонение может привести к потере продукта. В этом случае необходима система регулирования, которая бы предвосхищала изменения процесса. Такой упреждающий тип регулирования обеспечивается системой регулирования с воздействием по возмущению. Регулирование с воздействием по возмущениюРегулирование по возмущению — это регулирование с опережением, потому что прогнозируется ожидаемое изменение в регулируемой переменной и принимаются меры прежде, чем это изменение происходит. Это фундаментальное различие между регулированием с воздействием по возмущению и регулированием с обратной связью. Контур регулирования с воздействием по возмущению пытается нейтрализовать возмущение прежде, чем оно изменит регулируемую переменную, в то время, как контур регулирования с обратной связью пытается отрабатывать возмущение после того, как оно воздействует на регулируемую переменную.  Система регулирования с воздействием по возмущению Система регулирования с воздействием по возмущениюСистема регулирования с воздействием по возмущению имеет очевидное преимущество перед системой регулирования с обратной связью. При регулировании по возмущению в идеальном случае величина регулируемой переменной не изменяется, она остается на значении ее уставки. Но ручное регулирование по возмущению требует более сложного понимания того влияния, которое возмущение окажет на регулируемую переменную, а также использования более сложных и точных приборов. На заводе редко можно встретить чистую систему регулирования по возмущению. Когда используется система регулирования по возмущению, она обычно сочетается с системой регулирования с обратной связью. И даже в этом случае регулирование по возмущению предназначается только для более ответственных операций, которые требуют очень точного регулирования. Одноконтурные и многоконтурные системы регулированияОдноконтурная система регулирования или простой контур регулирования — это система регулирования с одним контуром, который обычно содержит только один первичный чувствительный элемент и обеспечивает обработку только одного входного сигнала на регулятор.  Одноконтурная система регулирования Одноконтурная система регулированияНекоторые системы регулирования имеют два или больше первичных элемента и обрабатывают больше, чем один входной сигнал на регулятор. Эти системы автоматического регулирования называются «многоконтурными» системами регулирования.  Многоконтурная система регулирования Многоконтурная система регулированияkipiavp.ru автоматическое регулирование - это... Что такое автоматическое регулирование? автоматическое регулирование автомати́ческое регули́рование автоматическое поддержание постоянства какой-либо физической величины – температуры, давления, уровня жидкости и т. д., – характеризующей технологический процесс, или её изменение по заданному закону (программное регулирование), или в соответствии с измеряемым внешним процессом (следящее регулирование). Осуществляется приложением управляющего воздействия к регулирующему органу объекта регулирования (напр., на задвижку, клапан). Для осуществления автоматического регулирования к регулируемому объекту подключается автоматический регулятор, вырабатывающий управляющее воздействие на регулирующий орган. Это управляющее воздействие вырабатывается регулятором в зависимости от разности между текущим значением регулируемой величины (температуры, давления, уровня жидкости и т. д.), измеряемой датчиком, и желаемым её значением, устанавливаемым задатчиком. Регулируемый объект и автоматический регулятор вместе образуют систему автоматического регулирования. Первые регуляторы осуществляли прямое регулирование, при котором датчик (измерительный орган) непосредственно воздействовал на регулирующий орган. Такое автоматическое регулирование было возможно только на машинах малой мощности, где для перемещения регулирующих органов (рычага, колеса) не требовалось больших затрат энергии. Позднее в цепь регулирования был введён усилитель (гидравлический, пневматический, электрический), что дало возможность реализовать непрямое регулирование с помощью исполнительного механизма. Оно повысило мощность воздействия регулятора на регулирующий орган.Энциклопедия «Техника». — М.: Росмэн. 2006. Автоматическое регулирование (синтез систем). Практически все этапы и режимы функционирования летательного аппарата сопровождаются (обеспечиваются) автоматическим регулированием. Регулируются как параметры полёта (в том числе координаты), так и параметры режима силовой установки, систем энергоснабжения, многочисленных других бортовых систем и агрегатов, включая систему жизнеобеспечения. Назначение систем автоматического регулирования (САР) заключается в исполнении (отработке) задающих воздействий в условиях помех (возмущающих воздействий). Задающие воздействия поступают от старших уровней системы управления, в том числе экипажа, или программируются заранее на стадии производства (монтажа) системы или её предполётной подготовки. От точности отработки задающих воздействий во многом зависят технико-экономические показатели и безопасность полётов. Поэтому качеству автоматического регулирования уделяется большое внимание. Используются все известные принципы регулирования: по отклонению (с обратной связью), по возмущению (с разомкнутым контуром), комбинированное (сочетание двух предыдущих принципов), адаптивное и др. Одним из путей обеспечения достаточно высокого качества процессов регулирования является синтез САР на стадии проектирования. Синтез САР заключается в определении структуры и параметров (коэффициентов) системы, обеспечивающих заданные показатели качества регулирования. Синтез САР определенным образом связан с анализом САР и в простейшей форме может базироваться на анализе множества вариантов, задаваемых произвольным образом. Однако таким путём практически невозможно достигнуть оптимальных решений. На всех этапах развития авиации и ракетно-космической техники для синтеза бортовых САР привлекались наиболее передовые для своего времени методы теории управления. На ранних этапах это были в основном методы теории устойчивости движения. Система «регулятор — регулируемый объект» проектировалась так, чтобы обеспечить устойчивость заданного состояния, на этом предварительный синтез заканчивался. В дальнейшем широкое распространение получили частотные методы синтеза САР — структурные динамические схемы контуров регулирования. САР рассматриваются как совокупность элементарных динамических звеньев однонаправленного действия, образующих взаимосвязанные или автономные контуры. Строгое обоснование частотный синтез имеет для так называем линейных систем. Для каждого элементарного линейного звена известны частотные характеристики, в том числе логарифмические частотные характеристики, правила определения частотных характеристик заданного соединения звеньев, а также критерии устойчивости и качества процессов регулирования, сформулированные в терминах частотных характеристик. На этой основе строятся инженерные методики синтеза контуров, широко применяемые и в 90 х гг. На базе этих методов обычно осуществляется предварительный синтез на начальной стадии проектирования САР. Последующие этапы синтеза выполняются с помощью электронно-вычислительных машин. В ходе математического, а на заключительной стадии и полунатурного (с реальной аппаратурой управления) моделирования уточняются структура и значения параметров синтезируемой системы, Процедуры синтеза посредством электронно-вычислительных машин во многом могут быть формализованы (автоматический поиск оптимальных структур и значений параметров) и являются основным направлением практического синтеза САР. Начиная с 60 х гг. широкое развитие и применение получила современная теория управления, базирующаяся на описании процессов в так называем пространстве состояний. Качество управления, критерии оптимизации в этой теории задаются в виде функционалов, как и в классическом вариационном исчислении, Эта теория явилась основой решения задач синтеза САР как в детерминированной (аналитическое конструирование регуляторов), так и стохастической (вероятностной) постановке, как при полной, так и при ограниченной информации о математической модели регулируемого процесса (синтез оптимальных адаптивных САР). Современная теория объединяет в единое целое теории фильтрации (оценивания), идентификации и собственно регулирования. Она позволяет синтезировать как непрерывные, так и дискретные алгоритмы, удобные для реализации в цифровых вычислительных машинах. В связи с совершенствованием и широким применением бортовых цифровых вычислительных управляющих систем, внедрением методов современной теории управления синтез бортовых САР всё больше трансформируется в разработку математического обеспечения. На эту разработку приходится всё большая доля затрат при создании перспективных систем.Авиация: Энциклопедия. — М.: Большая Российская Энциклопедия. Главный редактор Г.П. Свищев. 1994. .
Смотреть что такое "автоматическое регулирование" в других словарях:
dic.academic.ru автоматическое регулирование - это... Что такое автоматическое регулирование?автомати́ческое регули́рование (синтез систем). Практически все этапы и режимы функционирования летательного аппарата сопровождаются (обеспечиваются) автоматическим регулированием. Регулируются как параметры полёта (в том числе координаты), так и параметры режима силовой установки, систем энергоснабжения, многочисленных других бортовых систем и агрегатов, включая систему жизнеобеспечения. Назначение систем автоматического регулирования (САР) заключается в исполнении (отработке) задающих воздействий в условиях помех (возмущающих воздействий). Задающие воздействия поступают от старших уровней системы управления, в том числе экипажа, или программируются заранее на стадии производства (монтажа) системы или её предполётной подготовки. От точности отработки задающих воздействий во многом зависят технико-экономические показатели и безопасность полётов. Поэтому качеству автоматического регулирования уделяется большое внимание. Используются все известные принципы регулирования: по отклонению (с обратной связью), по возмущению (с разомкнутым контуром), комбинированное (сочетание двух предыдущих принципов), адаптивное и др. Одним из путей обеспечения достаточно высокого качества процессов регулирования является синтез САР на стадии проектирования. Синтез САР заключается в определении структуры и параметров (коэффициентов) системы, обеспечивающих заданные показатели качества регулирования. Синтез САР определенным образом связан с анализом САР и в простейшей форме может базироваться на анализе множества вариантов, задаваемых произвольным образом. Однако таким путём практически невозможно достигнуть оптимальных решений. На всех этапах развития авиации и ракетно-космической техники для синтеза бортовых САР привлекались наиболее передовые для своего времени методы теории управления. На ранних этапах это были в основном методы теории устойчивости движения. Система «регулятор регулируемый объект» проектировалась так, чтобы обеспечить устойчивость заданного состояния, на этом предварительный синтез заканчивался. В дальнейшем широкое распространение получили частотные методы синтеза САР структурные динамические схемы контуров регулирования. САР рассматриваются как совокупность элементарных динамических звеньев однонаправленного действия, образующих взаимосвязанные или автономные контуры. Строгое обоснование частотный синтез имеет для так называемых линейных систем. Для каждого элементарного линейного звена известны частотные характеристики, в том числе логарифмические частотные характеристики, правила определения частотных характеристик заданного соединения звеньев, а также критерии устойчивости и качества процессов регулирования, сформулированные в терминах частотных характеристик. На этой основе строятся инженерные методики синтеза контуров, широко применяемые и в 90-х гг. На базе этих методов обычно осуществляется предварительный синтез на начальной стадии проектирования САР. Последующие этапы синтеза выполняются с помощью электронно-вычислительных машин. В ходе математического, а на заключительной стадии и полунатурного (с реальной аппаратурой управления) моделирования уточняются структура и значения параметров синтезируемой системы, Процедуры синтеза посредством электронно-вычислительных машин во многом могут быть формализованы (автоматический поиск оптимальных структур и значений параметров) и являются основным направлением практического синтеза САР. Начиная с 60-х гг. широкое развитие и применение получила современная теория управления, базирующаяся на описании процессов в так называемом пространстве состояний. Качество управления, критерии оптимизации в этой теории задаются в виде функционалов, как и в классическом вариационном исчислении, Эта теория явилась основой решения задач синтеза САР как в детерминированной (аналитическое конструирование регуляторов), так и стохастической (вероятностной) постановке, как при полной, так и при ограниченной информации о математической модели регулируемого процесса (синтез оптимальных адаптивных САР). Современная теория объединяет в единое целое теории фильтрации (оценивания), идентификации и собственно регулирования. Она позволяет синтезировать как непрерывные, так и дискретные алгоритмы, удобные для реализации в цифровых вычислительных машинах. В связи с совершенствованием и широким применением бортовых цифровых вычислительных управляющих систем, внедрением методов современной теории управления синтез бортовых САР всё больше трансформируется в разработку математического обеспечения. На эту разработку приходится всё большая доля затрат при создании перспективных систем. Литература:Системы автоматического управления самолётом, Методы анализа и расчета, М., 1973;Красовский А. А., Системы автоматического управления полетом и их аналитическое конструирование, М., 1973;Бюшгенс Г. С., Студнев Р. В., Аэродинамика самолёта. Динамика продольного и бокового движения, М., 1979. Л. А. Красовский. Энциклопедия «Авиация». - М.: Большая Российская Энциклопедия. Свищёв Г. Г.. 1998. avia.academic.ru автоматическое регулирование - это... Что такое автоматическое регулирование?автомати́ческое регули́рование (синтез систем). Практически все этапы и режимы функционирования летательного аппарата сопровождаются (обеспечиваются) автоматическим регулированием. Регулируются как параметры полёта (в том числе координаты), так и параметры режима силовой установки, систем энергоснабжения, многочисленных других бортовых систем и агрегатов, включая систему жизнеобеспечения. Назначение систем автоматического регулирования (САР) заключается в исполнении (отработке) задающих воздействий в условиях помех (возмущающих воздействий). Задающие воздействия поступают от старших уровней системы управления, в том числе экипажа, или программируются заранее на стадии производства (монтажа) системы или её предполётной подготовки. От точности отработки задающих воздействий во многом зависят технико-экономические показатели и безопасность полётов. Поэтому качеству автоматического регулирования уделяется большое внимание. Используются все известные принципы регулирования: по отклонению (с обратной связью), по возмущению (с разомкнутым контуром), комбинированное (сочетание двух предыдущих принципов), адаптивное и др. Одним из путей обеспечения достаточно высокого качества процессов регулирования является синтез САР на стадии проектирования. Синтез САР заключается в определении структуры и параметров (коэффициентов) системы, обеспечивающих заданные показатели качества регулирования. Синтез САР определенным образом связан с анализом САР и в простейшей форме может базироваться на анализе множества вариантов, задаваемых произвольным образом. Однако таким путём практически невозможно достигнуть оптимальных решений. На всех этапах развития авиации и ракетно-космической техники для синтеза бортовых САР привлекались наиболее передовые для своего времени методы теории управления. На ранних этапах это были в основном методы теории устойчивости движения. Система «регулятор регулируемый объект» проектировалась так, чтобы обеспечить устойчивость заданного состояния, на этом предварительный синтез заканчивался. В дальнейшем широкое распространение получили частотные методы синтеза САР структурные динамические схемы контуров регулирования. САР рассматриваются как совокупность элементарных динамических звеньев однонаправленного действия, образующих взаимосвязанные или автономные контуры. Строгое обоснование частотный синтез имеет для так называемых линейных систем. Для каждого элементарного линейного звена известны частотные характеристики, в том числе логарифмические частотные характеристики, правила определения частотных характеристик заданного соединения звеньев, а также критерии устойчивости и качества процессов регулирования, сформулированные в терминах частотных характеристик. На этой основе строятся инженерные методики синтеза контуров, широко применяемые и в 90-х гг. На базе этих методов обычно осуществляется предварительный синтез на начальной стадии проектирования САР. Последующие этапы синтеза выполняются с помощью электронно-вычислительных машин. В ходе математического, а на заключительной стадии и полунатурного (с реальной аппаратурой управления) моделирования уточняются структура и значения параметров синтезируемой системы, Процедуры синтеза посредством электронно-вычислительных машин во многом могут быть формализованы (автоматический поиск оптимальных структур и значений параметров) и являются основным направлением практического синтеза САР. Начиная с 60-х гг. широкое развитие и применение получила современная теория управления, базирующаяся на описании процессов в так называемом пространстве состояний. Качество управления, критерии оптимизации в этой теории задаются в виде функционалов, как и в классическом вариационном исчислении, Эта теория явилась основой решения задач синтеза САР как в детерминированной (аналитическое конструирование регуляторов), так и стохастической (вероятностной) постановке, как при полной, так и при ограниченной информации о математической модели регулируемого процесса (синтез оптимальных адаптивных САР). Современная теория объединяет в единое целое теории фильтрации (оценивания), идентификации и собственно регулирования. Она позволяет синтезировать как непрерывные, так и дискретные алгоритмы, удобные для реализации в цифровых вычислительных машинах. В связи с совершенствованием и широким применением бортовых цифровых вычислительных управляющих систем, внедрением методов современной теории управления синтез бортовых САР всё больше трансформируется в разработку математического обеспечения. На эту разработку приходится всё большая доля затрат при создании перспективных систем. Литература:Системы автоматического управления самолётом, Методы анализа и расчета, М., 1973;Красовский А. А., Системы автоматического управления полетом и их аналитическое конструирование, М., 1973;Бюшгенс Г. С., Студнев Р. В., Аэродинамика самолёта. Динамика продольного и бокового движения, М., 1979. Л. А. Красовский. Энциклопедия «Авиация». - М.: Большая Российская Энциклопедия. Свищёв Г. Г.. 1998. avia.academic.ru АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ И РЕГУЛИРОВАНИЕ - это... Что такое АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ И РЕГУЛИРОВАНИЕ? АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ И РЕГУЛИРОВАНИЕ С первых шагов цивилизации человек пытался механизировать труд. Он очень быстро нашел пути замены мускульной энергии механической; высшей точкой этого начального периода технического прогресса была промышленная революция 18 в. Новая эпоха началась, когда человек научился производить и распределять энергию. К 20 в. в передовых странах механическая энергия, получаемая от пара, текущей воды и электричества, в основном заменила энергию человека и животных. Когда стали доступны большие количества энергии, интерес общества сместился на управление такой энергией. Следующий важный этап в развитии техники, называемый иногда второй промышленной революцией, начался в 1930-х годах. Эта революция была связана не с изобретением принципиально новых механических устройств, а скорее с реализацией некоторой идеи, а именно идеи саморегулирования (рис. 1), которая является фундаментальной характеристикой неисчислимых естественных процессов. Хотя существование саморегулирующихся процессов в природе было замечено людьми давно, только в 20 в. были сформулированы и систематически разработаны принципы автоматического регулирования. Применение этих принципов открыло новую эру в технике и промышленности.См. также АВТОМАТИЗАЦИЯ.Рис. 1. АРАБСКИЕ ВОДЯНЫЕ ЧАСЫ (1 в. н.э.) иллюстрируют одно из ранних применений принципа саморегулирования.Понятие обратной связи. Важной особенностью большинства управляемых процессов является обратная связь. Понятие обратной связи можно легко проиллюстрировать с помощью простого примера моряка, управляющего кораблем с помощью рулевого колеса (рис. 2). Штурвальный выдерживает курс судна в соответствии с заданными командами. Этот метод управления, обозначаемый термином "управление с разомкнутым контуром", страдает несколькими серьезными недостатками. Так, при изменении характеристик привода - исполнительного механизма, изменяющего положение руля, - судно будет сбиваться с курса, если рулевой не имеет никакой информации о действительном направлении движения.Рис. 2. СИСТЕМА С РАЗОМКНУТЫМ КОНТУРОМ на примере управления судном путем фиксации штурвала в одном положении. Это не обязательно обеспечит нужный курс корабля, поскольку ветер или сильное волнение моря может изменить этот курс.Если бы рулевой постоянно следил за курсом судна по компасу, сравнивал его с заданным и вращал штурвал так, чтобы уменьшить выявленную ошибку, судно приблизительно выдерживало бы нужный курс (рис. 3). Можно заметить, что в этом случае штурвальный выполняет три основные функции - обнаруживает отклонение действительного исполнения от заданного, принимает решение о коррекции действия и реализует его с помощью штурвала. Эти действия по обнаружению и коррекции ошибки, а также по управлению показаны на рис. 3 как обратная связь от управляемой величины к управляющей. В такой системе фигурирует не только направление движения корабля, задаваемое положением штурвала, но и само положение штурвала зависит от этого направления. Взаимозависимость двух величин - положения штурвала и курса судна - определяет концепцию, называемую в инженерной среде обратной связью, а термин "автоматические системы управления" обычно относится к автоматическим системам, построенным на этой концепции; часто такие системы называются также "системами управления с обратной связью" или "системами с замкнутым контуром".Рис. 3. В СИСТЕМЕ С ЗАМКНУТЫМ КОНТУРОМ (с обратной связью) штурвальный имеет информацию о действительном курсе судна, так что он может применить корректирующее управление, чтобы сохранить нужный курс.Теперь можно дать формальное определение систем с замкнутым контуром: система с замкнутым контуром есть система, в которой истинное состояние управляемой переменной (называемое "выход") непрерывно сравнивается с желаемым состоянием (называемым "вход"), и сигнал, пропорциональный разнице между этими двумя состояниями, воздействует на управляющий элемент с целью уменьшить ошибку. В этом определении ничего не говорится об энергии, требуемой для изменения выхода, или об энергии, имеющейся на входе. Как правило, на вход системы управления подается небольшая энергия, а энергия для выхода черпается из внешнего источника. Таким образом, особенностью большинства систем автоматического управления является значительное усиление мощности.Принцип действия и проектирование. Автоматические системы управления могут быть разделены на две основные группы: стабилизирующие и следящие. В следящих системах (сервомеханизмах) входной сигнал меняется произвольно и зачастую непрерывно, тогда как в стабилизирующих ему задается фиксированное значение, а цель управления - сохранить выход постоянным, несмотря на флуктуации нагрузки. Термостат, у которого выходом является фиксированная температура, и стабилизатор напряжения, выходом которого служит нужное напряжение в сети, являются примерами стабилизирующих систем. В качестве примеров сервомеханизмов можно назвать радиолокационные и артиллерийские системы наведения и автопилоты, управляющие положением и направлением движения летательных аппаратов.См. также СЕРВОМЕХАНИЗМ. Автоматическая система управления не может функционировать без некоторой ошибки, потому что именно эта ошибка является источником управляющего сигнала. Задача проектировщика системы управления - сделать эту ошибку как можно меньше и тем самым увеличить чувствительность системы. Эта задача связана с определенными ограничениями, что становится ясно из следующего примера. Система управления с обратной связью, показанная на рис. 4, нужна для наведения тяжелого орудия с высокой точностью; она состоит из детектора ошибки, усилителя и серводвигателя. Ключевым элементом системы является прибор, который обнаруживает рассогласование угловых направлений цели и орудия, вырабатывая пропорциональный ему сигнал. Этот "сигнал ошибки", обычно очень малый, усиливается и прилагается в виде напряжения к одной из обмоток возбуждения электродвигателя, который развивает вращающий момент, пропорциональный указанному напряжению. Этот вращающий момент перемещает ствол орудия в направлении, приводящем к уменьшению ошибки.Рис. 4. УПРАВЛЕНИЕ ПО РАССОГЛАСОВАНИЮ (ошибке) на примере автоматического прицела артиллерийского орудия.Если направление на цель изменяется, то орудие следует за ним. Однако по инерции орудие будет проскакивать нужное положение, приводя к появлению ошибки с противоположным знаком. Это, в свою очередь, заставит серводвигатель повернуть орудие в обратном направлении. Следовательно, орудийный ствол может рыскать туда-сюда, проскакивая правильное положение. Такой режим работы системы управления называется "автоколебательным" и является принципиальным ограничением управления с обратной связью. (Например, при запаздывании сигнала обратной связи на 180° происходило бы усиление колебаний.) Поэтому главная проблема, которая встает перед проектировщиком систем управления, заключается в предотвращении неконтролируемых колебаний при одновременном сохранении высокой чувствительности системы к управляющему сигналу. Первым очевидным решением является минимизация запаздывания сигнала обратной связи путем использования приборов с малым временем реакции. Это может улучшить устойчивость системы, но обычно не решает проблемы полностью. Кроме того, в большинстве практических ситуаций проектировщик вынужден использовать существующие элементы системы, что диктуется соображениями веса и стоимости. Вторая и наиболее распространенная процедура - применение в контуре корректирующих звеньев (рис. 5), нейтрализующих эффект западывания. При отсутствии таких компенсаторов управляющий сигнал представляет собой усиленную ошибку и имеет тот же знак, что и ошибка. Если компенсатор вырабатывает составляющую сигнала, пропорциональную производной от ошибки по времени, то общий управляющий сигнал будет уменьшаться и станет отрицательным прежде, чем система "промахнется". Это воспрепятствует вхождению системы в режим автоколебаний. Такой способ компенсирующего управления называется "фазовым упреждением" или "управлением с дифференцирующей цепочкой".Рис. 5. БЛОК-СХЕМА системы управления с корректирующим звеном. Вернемся к нашему примеру об управлении курсом корабля. На любом достаточно большом корабле его реакция на поворот штурвала настолько замедленна, что, если рулевой перекладывает штурвал вправо только тогда, когда корабль явно отклоняется влево от правильного курса, это вызовет лишь увеличение амплитуды колебаний относительно курса. По этой причине рулевой должен предвидеть каждое отклонение и, чтобы уменьшить колебания, раньше перекладывать штурвал в противоположном направлении. Другим видом компенсирующего элемента является прибор с интегрирующей цепочкой, который игнорирует малые быстро флуктуирующие сигналы ошибки и принимает во внимание только монотонную составляющую. Это уменьшает эффект обратной связи на высоких частотах, но сохраняет его силу на низких частотах. Поскольку большинство систем управления с обратной связью адекватно реагирует только на низкочастотные сигналы, такая компенсация повышает точность. В большинстве систем управления упомянутые компенсаторы могут быть механическими или электрическими, и проектировщик имеет полную свободу в их подборе для достижения наилучшей эффективности. Еще один метод улучшения управления - введение дополнительных (вторичных) контуров обратной связи, в которых могут вырабатываться любые нужные составляющие сигнала. В конкретной ситуации проектировщику предоставляется выбор комбинации из самых последних методов, обеспечивающих правильное проектирование системы управления. В рассмотренных выше случаях предполагается, что управляемый процесс или объект неизменны, а система управления и компенсирующие элементы подгоняются под процесс. С ростом потребности в управлении во многих отраслях промышленности и техники нет ничего необычного в том, что сами установки проектируются так, чтобы получить максимум преимуществ от использования последних достижений теории управления. В таких случаях сама установка становится частью системы управления. Действительно, по мере усложнения систем с обратной связью среди конструкторов и специалистов по управлению растет осознание того, что, хотя различные части системы, например ракеты, могут исследоваться и анализироваться независимо, сама система должна проектироваться как единое целое. Этот аспект проектирования сложных систем приобрел важное значение и получил название "системного анализа", или "системотехники".См. также СИСТЕМОТЕХНИКА.Сложные системы управления. Любые самые сложные системы управления - будь то самолет, ядерный реактор или даже государство - включают функции оценки состояния, выработки сигнала обратной связи и управления. Главная задача любой системы управления - сделать выходные сигналы близкими к нужным значениям как можно быстрее и точнее. Другой важной характеристикой системы управления является ее устойчивость, т.е. ситуация, когда ее выходные сигналы не превышают заданных пределов. Следовательно, устойчивость, быстродействие и точность рассматриваются в качестве основных целей при проектировании эффективной системы управления. Однако в некоторых системах увеличение быстродействия сверх определенного предела может вызвать снижение точности и даже привести к неустойчивости. Поэтому достижение наилучшего соотношения между этими характеристиками является одной из важнейших задач проектирования системы управления. В динамической системе, т.е. в такой системе, характеристики которой изменяются в зависимости от времени и места, три фактора осложняют задачу управления: 1) система имеет большое число входов и выходов; 2) имеется неточность в измерении характеристик или знании системы; 3) поскольку характеристики системы все время изменяются, может оказаться затруднительным расчет требуемых управляющих сигналов. Чтобы количественно оценить влияние входов системы на ее выходы, нужна математическая модель этой системы. Для этого может быть применен компьютер. Вообще, компьютер используется во всех сложных системах, выполняя операции оценки состояния, выработки сигнала обратной связи и управления. В 1960-х годах были разработаны основы современной математической теории оптимального управления. Они позволяют генерировать управляющие сигналы, которые оптимизируют тот или иной показатель эффективности - например, время, энергию, расход топлива или стоимость - в больших системах, для которых могут быть разработаны точные математические модели.Адаптация, обучение и искусственный интеллект. В реальном мире большинство систем не только изменяются в зависимости от времени и места, но и не могут быть представлены точными математическими моделями. Необходимость управлять такими системами привела к созданию новых теорий адаптации, обучения и самоорганизации. Это, в свою очередь, привело к появлению сложных систем управления с обратной связью, в которых компьютер выполняет эксперименты над системой, исследует ее характеристики в процессе работы и меняет стратегию управления. Можно сказать, что такие системы управления имитируют адаптивные способности живых организмов в изменяющихся и неопределенных условиях среды. Таким образом, вообще говоря, адаптивная система управления требует двух различных операций: идентификации характеристик управляемой системы и настройки параметров управляющей системы с учетом динамики управляемой. Другой областью исследований, оказывающей существенное влияние на проектирование сложных автоматических систем, является теория обучения. Идеи, развитые в математической психологии, могут быть применены к проектированию систем, использующих обратную связь по состоянию, что позволяет выбрать оптимальное действие из конечного набора действий. Распознавание образов - одна из форм обучения, нашедшая применение в некоторых современных системах с обратной связью. Если управляемая система имеет конечное число состояний, а параметры оптимального управления, соответствующие каждому состоянию, сохраняются в памяти компьютера, то скорость адаптации системы управления может быть существенно повышена с помощью устройства распознавания. Например, на космическом корабле распознавание состояния по измерениям температуры, влажности, давления, вибраций, радиации и т.п. является задачей распознавания образов. Кроме исследований, упомянутых выше, многое делается в области разработки искусственного интеллекта, который включает более высокие уровни обратной связи, такие, как поиск информации, перевод с одного языка на другой, игры, доказательство теорем и решение комплексных проблем. Эти идеи начинают находить применение в различных областях современной науки и технологии. Электроника и компьютерные технологии, особенно разработка микропроцессоров, открыли новые пути применения теорий управления, основанных на сложных формах обратной связи. Человечество вступает в эру, где какие-либо применения будут ограничиваться только состоянием теории и воображением проектировщика.См. такжеИНТЕЛЛЕКТ ИСКУССТВЕННЫЙ;КОМПЬЮТЕР;ЭЛЕКТРОННАЯ ПРОМЫШЛЕННОСТЬ;ИНФОРМАЦИИ НАКОПЛЕНИЕ И ПОИСК;ИНФОРМАЦИИ ТЕОРИЯ.ЛИТЕРАТУРАНетушил А.В. и др. Теория автоматического управления. М., 1983 Абдуллаев Н.Д., Петров Ю.П. Теория и методы проектирования оптимальных регуляторов. Л., 1985 Первозванский А.А. Курс теории автоматического управления. М., 1986 Зайцев Г.Ф. Основы автоматического управления и регулирования. Киев, 1988Энциклопедия Кольера. — Открытое общество. 2000.
Смотреть что такое "АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ И РЕГУЛИРОВАНИЕ" в других словарях:
dic.academic.ru Автоматическое регулированиеОбратная связь ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса - ваш вокал Как цель узнает о ваших желаниях прежде, чем вы начнете действовать. Как компании прогнозируют привычки и манипулируют ими Целительная привычка Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Тренинг уверенности в себе Вкуснейший "Салат из свеклы с чесноком" Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Как слышать голос Бога Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека - Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
1. Параметрами технологического процесса являются… A) физические величины, определяющие ход технологического процесса 2. Автоматическое управление осуществляет… A)автоматическая система управления 3. Систему автоматического регулирования составляет совокупность: A)автоматический регулятор и объект регулирования 4. Систему автоматического управления составляет совокупность: A)автоматическое управляющее устройство и объект управления 5. Автоматическое управление – это… A)совокупность воздействий на технологический процесс направленных на достижение поставленной цели 6. Автоматическое регулирование - это … A)частный случай автоматического управления, когда параметр регулируется 7. Автоматическое управляющее устройство – это … A)техническое устройство, осуществляющее функции объекта управления 8. Автоматический регулятор – это … A)техническое устройство для поддержания регулируемой величины на заданном значении или изменение ее по определенному закону 9. Управляемый объект или объект управления – это … A)набор технического оборудования, где реализуется технологический процесс 10. Регулирующее воздействие на объект оказывает … A)регулятор 11. Случайные переменные, воздействующие на объект и вызывающие отклонения регулируемой переменной от заданного значения, называется … A)возмущением 12. Автоматизация технологического процесса – это … A)внедрение технических средств автоматики, микропроцессорных средств и ЭВМ в технологический процесс 13. Автоматизированная система – это … A)человеко-машинная система управления 14. Совокупность технологического объекта управления (ТАУ) и АСУ ТП носит название … A)автоматизированного технологического комплекса (АТК) 15. АСР по возмущению является … A)разомкнутой системой 16. АСР по отклонению регулируемого параметра от заданного значения является … A)замкнутой системой 17. Комбинированная АСР реализует принципы регулирования … A)по отклонению и по возмущению 18. Недостатком принципа регулирования по возмущению является … A)отсутствие информации с выхода системы на ее вход 19. Достоинством принципа регулирования по возмущению является … A)компенсация основного возмущения 20. Достоинством принципа регулирования по отклонению является … A)информация о регулируемом параметре поступает на вход регулятора через обратную связь 21. Недостатком принципа регулирования по отклонению регулируемой величины является … A)неустойчивость и склонность к автоколебаниям при работе с большим коэффициентом передачи 22. Основная задача стабилизирующая АСР … A)поддержания значения регулируемой величины на заданном уровне 23. Основная задача программной АСР … A)изменение регулируемой величины по заранее заданному закону 24. Основная задача следящей АСР … A)изменение регулируемой величины по закону, который заранее неизвестен и зависит от входного сигнала 25. Линейная система регулирования описывается … A)линейными дифференциальными уравнениями 26. Статическая характеристика звена или АСР устанавливает связь между выходными и входными параметрами … A)в установившемся режиме 27. Сущность метода линеаризации нелинейной статистической характеристики заключается … A)замене участке кривой прямой касательной к этой кривой в заданной точке 28. Аналитическая линеаризация нелинейной зависимости статистической характеристики осуществляется … A)разложением функции в ряд Тейлора по малым приращениям аргумента 29. Временная динамическая характеристика, переходная функция (реакция звена) – это… A)единичное, ступенчатое возмущение (единичный скачок) 30. Преобразование Лапласа состоит в том, что вместо функции времени используют … A)функцию комплексной переменной 31. В преобразовании Лапласа функция комплексной переменной Х(Р) называется … A)изображением функции 32. Отношение в виде комплексных чисел выходной и входной величин системы (звено) в установившемся режиме гармонических колебаний представляет собой … A)комплексную (частотную) передаточную функцию звено (системы) 33. Кривая описываемая концом вектора комплексной (частотной) передаточной функции системы (звено) при изменении частоты от 0 до¥, называется … A)АФЧХ системы (звено) 34. Зависимость модуля комплексной (частотной) передаточной функции системы (звено) от частоты является … A)АЧХ этой системы (звено) 35. Зависимость аргумента комплексной (частотной) передаточной функции системы (звено) от частоты является … A)ФЧХ этой системы (звено) 36. Показательная форма комплексной (частотной) передаточной функции (КПФ) где А(w)- представляет собой … A)модуль КПФ 37. Показательная форма комплексной (частотной) передаточной функции (КПФ) гдеj(w)- представляет собой … A)аргумент КПФ 38. Алгебраическая форма комплексной (частотной) передаточной функций (КПФ) где Р(w)- представляет собой … A)действительную часть КПФ 39. Алгебраическая форма комплексной (частотной) передаточной функций (КПФ) где Q(w)- представляет собой … A)мнимую часть КПФ 40. Зависимость логарифма модуля 20 lg А(w) комплексной (частотной) передаточной функции от частоты, отложенной по оси абсцисс в логарифмическом масштабе, называется … A)ЛАЧХ 41. Зависимость аргумента комплексной (частотной) передаточной функции от частоты, отложенной по оси абсцисс в логарифмическом масштабе, называется … A)ЛФЧХ 42. Передаточная функция усилительного (безинерционного, пропорционального) звена имеет вид … A) W(p)=K 43. Уравнение пропорционального (усилительного, безинерционного) звена имеет вид… A) Хвых=кхвх 44. Пропорциональное звено создает сдвиг по фазе на выходе … A)00 (совпадает по фазе с колебаниями на входе на всех частотах) 45. В пропорциональном звене амплитуде выходного сигнала с увеличением частоты … A)остается неизменной 46. ЛАЧХ пропорционального звена представляет … A)прямую 20 lg K 47. Частота в логарифмическом масштабе измеряется в … A)декадах 48. Примером усилительного (безынерционного пропорционального) звена являются: A)усилитель, рычаг, редуктор, потенциометр 49. Примерами инерционного (апериодического звена I порядка) являются: A)тепловые объекты, термопары 50. Инерционное звено создает сдвиг по фазе на выходе… A)отставание на 900 51. Амплитуда выходного сигнала инерционного звена с увеличением частоты … A)уменьшается 52. ЛАЧХ инерционного звена представляет … A)две сопрягающиеся прямые 20 lgK и –20дб/дек 53. В инерционной звене выходной сигнал по фазе частоты фазы выходного сигнала, которая … A)отстает от входного сигнала 54. ЛФЧХ колебательного звена представляет зависимость от логарифма частоты фазы выходного сигнала, которая максимально … A)отстает на 1800 от входного 55. ЛАЧХ колебательного звена представляет … A)две сопрягающиеся прямые 20 lgk и –40дб/дек
56. Амплитуда выходного сигнала колебательного звена с увеличением частоты… A)увеличивается, имеет максимум, а затем уменьшается 57. В колебательном звене выходной сигнал по фазе … A)отстает от входного 58. Уравнением колебательного звена является зависимость … A)Т2d2xвых/dt2+ 2 Тdxвых/dt+хвых=кхвх 59. Примерами колебательного звена являются: A)контур R,L,C масса подвешенная на пружинке 60. Примерами интегрирующего звена является: A)электродвигатель 61. Уравнением интегрирующего звена является зависимость… A)хвых=кИ 62. Передаточная функция инерционного звена … А)W(p)=k/Tp+1 megapredmet.ru АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ И РЕГУЛИРОВАНИЕС первых шагов цивилизации человек пытался механизировать труд. Он очень быстро нашел пути замены мускульной энергии механической; высшей точкой этого начального периода технического прогресса была промышленная революция 18 в. Новая эпоха началась, когда человек научился производить и распределять энергию. К 20 в. в передовых странах механическая энергия, получаемая от пара, текущей воды и электричества, в основном заменила энергию человека и животных. Когда стали доступны большие количества энергии, интерес общества сместился на управление такой энергией. Следующий важный этап в развитии техники, называемый иногда второй промышленной революцией, начался в 1930-х годах. Эта революция была связана не с изобретением принципиально новых механических устройств, а скорее с реализацией некоторой идеи, а именно идеи саморегулирования (рис. 1), которая является фундаментальной характеристикой неисчислимых естественных процессов. Хотя существование саморегулирующихся процессов в природе было замечено людьми давно, только в 20 в. были сформулированы и систематически разработаны принципы автоматического регулирования. Применение этих принципов открыло новую эру в технике и промышленности.См. также АВТОМАТИЗАЦИЯ.Рис. 1. АРАБСКИЕ ВОДЯНЫЕ ЧАСЫ (1 в. н.э.) иллюстрируют одно из ранних применений принципа саморегулирования.Понятие обратной связи. Важной особенностью большинства управляемых процессов является обратная связь. Понятие обратной связи можно легко проиллюстрировать с помощью простого примера моряка, управляющего кораблем с помощью рулевого колеса (рис. 2). Штурвальный выдерживает курс судна в соответствии с заданными командами. Этот метод управления, обозначаемый термином "управление с разомкнутым контуром", страдает несколькими серьезными недостатками. Так, при изменении характеристик привода - исполнительного механизма, изменяющего положение руля, - судно будет сбиваться с курса, если рулевой не имеет никакой информации о действительном направлении движения.Рис. 2. СИСТЕМА С РАЗОМКНУТЫМ КОНТУРОМ на примере управления судном путем фиксации штурвала в одном положении. Это не обязательно обеспечит нужный курс корабля, поскольку ветер или сильное волнение моря может изменить этот курс. Если бы рулевой постоянно следил за курсом судна по компасу, сравнивал его с заданным и вращал штурвал так, чтобы уменьшить выявленную ошибку, судно приблизительно выдерживало бы нужный курс (рис. 3). Можно заметить, что в этом случае штурвальный выполняет три основные функции - обнаруживает отклонение действительного исполнения от заданного, принимает решение о коррекции действия и реализует его с помощью штурвала. Эти действия по обнаружению и коррекции ошибки, а также по управлению показаны на рис. 3 как обратная связь от управляемой величины к управляющей. В такой системе фигурирует не только направление движения корабля, задаваемое положением штурвала, но и само положение штурвала зависит от этого направления. Взаимозависимость двух величин - положения штурвала и курса судна - определяет концепцию, называемую в инженерной среде обратной связью, а термин "автоматические системы управления" обычно относится к автоматическим системам, построенным на этой концепции; часто такие системы называются также "системами управления с обратной связью" или "системами с замкнутым контуром".Рис. 3. В СИСТЕМЕ С ЗАМКНУТЫМ КОНТУРОМ (с обратной связью) штурвальный имеет информацию о действительном курсе судна, так что он может применить корректирующее управление, чтобы сохранить нужный курс. Теперь можно дать формальное определение систем с замкнутым контуром: система с замкнутым контуром есть система, в которой истинное состояние управляемой переменной (называемое "выход") непрерывно сравнивается с желаемым состоянием (называемым "вход"), и сигнал, пропорциональный разнице между этими двумя состояниями, воздействует на управляющий элемент с целью уменьшить ошибку. В этом определении ничего не говорится об энергии, требуемой для изменения выхода, или об энергии, имеющейся на входе. Как правило, на вход системы управления подается небольшая энергия, а энергия для выхода черпается из внешнего источника. Таким образом, особенностью большинства систем автоматического управления является значительное усиление мощности.Принцип действия и проектирование. Автоматические системы управления могут быть разделены на две основные группы: стабилизирующие и следящие. В следящих системах (сервомеханизмах) входной сигнал меняется произвольно и зачастую непрерывно, тогда как в стабилизирующих ему задается фиксированное значение, а цель управления - сохранить выход постоянным, несмотря на флуктуации нагрузки. Термостат, у которого выходом является фиксированная температура, и стабилизатор напряжения, выходом которого служит нужное напряжение в сети, являются примерами стабилизирующих систем. В качестве примеров сервомеханизмов можно назвать радиолокационные и артиллерийские системы наведения и автопилоты, управляющие положением и направлением движения летательных аппаратов.См. также СЕРВОМЕХАНИЗМ. Автоматическая система управления не может функционировать без некоторой ошибки, потому что именно эта ошибка является источником управляющего сигнала. Задача проектировщика системы управления - сделать эту ошибку как можно меньше и тем самым увеличить чувствительность системы. Эта задача связана с определенными ограничениями, что становится ясно из следующего примера. Система управления с обратной связью, показанная на рис. 4, нужна для наведения тяжелого орудия с высокой точностью; она состоит из детектора ошибки, усилителя и серводвигателя. Ключевым элементом системы является прибор, который обнаруживает рассогласование угловых направлений цели и орудия, вырабатывая пропорциональный ему сигнал. Этот "сигнал ошибки", обычно очень малый, усиливается и прилагается в виде напряжения к одной из обмоток возбуждения электродвигателя, который развивает вращающий момент, пропорциональный указанному напряжению. Этот вращающий момент перемещает ствол орудия в направлении, приводящем к уменьшению ошибки.Рис. 4. УПРАВЛЕНИЕ ПО РАССОГЛАСОВАНИЮ (ошибке) на примере автоматического прицела артиллерийского орудия. Если направление на цель изменяется, то орудие следует за ним. Однако по инерции орудие будет проскакивать нужное положение, приводя к появлению ошибки с противоположным знаком. Это, в свою очередь, заставит серводвигатель повернуть орудие в обратном направлении. Следовательно, орудийный ствол может рыскать туда-сюда, проскакивая правильное положение. Такой режим работы системы управления называется "автоколебательным" и является принципиальным ограничением управления с обратной связью. (Например, при запаздывании сигнала обратной связи на 180° происходило бы усиление колебаний.) Поэтому главная проблема, которая встает перед проектировщиком систем управления, заключается в предотвращении неконтролируемых колебаний при одновременном сохранении высокой чувствительности системы к управляющему сигналу. Первым очевидным решением является минимизация запаздывания сигнала обратной связи путем использования приборов с малым временем реакции. Это может улучшить устойчивость системы, но обычно не решает проблемы полностью. Кроме того, в большинстве практических ситуаций проектировщик вынужден использовать существующие элементы системы, что диктуется соображениями веса и стоимости. Вторая и наиболее распространенная процедура - применение в контуре корректирующих звеньев (рис. 5), нейтрализующих эффект западывания. При отсутствии таких компенсаторов управляющий сигнал представляет собой усиленную ошибку и имеет тот же знак, что и ошибка. Если компенсатор вырабатывает составляющую сигнала, пропорциональную производной от ошибки по времени, то общий управляющий сигнал будет уменьшаться и станет отрицательным прежде, чем система "промахнется". Это воспрепятствует вхождению системы в режим автоколебаний. Такой способ компенсирующего управления называется "фазовым упреждением" или "управлением с дифференцирующей цепочкой".Рис. 5. БЛОК-СХЕМА системы управления с корректирующим звеном. Вернемся к нашему примеру об управлении курсом корабля. На любом достаточно большом корабле его реакция на поворот штурвала настолько замедленна, что, если рулевой перекладывает штурвал вправо только тогда, когда корабль явно отклоняется влево от правильного курса, это вызовет лишь увеличение амплитуды колебаний относительно курса. По этой причине рулевой должен предвидеть каждое отклонение и, чтобы уменьшить колебания, раньше перекладывать штурвал в противоположном направлении. Другим видом компенсирующего элемента является прибор с интегрирующей цепочкой, который игнорирует малые быстро флуктуирующие сигналы ошибки и принимает во внимание только монотонную составляющую. Это уменьшает эффект обратной связи на высоких частотах, но сохраняет его силу на низких частотах. Поскольку большинство систем управления с обратной связью адекватно реагирует только на низкочастотные сигналы, такая компенсация повышает точность. В большинстве систем управления упомянутые компенсаторы могут быть механическими или электрическими, и проектировщик имеет полную свободу в их подборе для достижения наилучшей эффективности. Еще один метод улучшения управления - введение дополнительных (вторичных) контуров обратной связи, в которых могут вырабатываться любые нужные составляющие сигнала. В конкретной ситуации проектировщику предоставляется выбор комбинации из самых последних методов, обеспечивающих правильное проектирование системы управления. В рассмотренных выше случаях предполагается, что управляемый процесс или объект неизменны, а система управления и компенсирующие элементы подгоняются под процесс. С ростом потребности в управлении во многих отраслях промышленности и техники нет ничего необычного в том, что сами установки проектируются так, чтобы получить максимум преимуществ от использования последних достижений теории управления. В таких случаях сама установка становится частью системы управления. Действительно, по мере усложнения систем с обратной связью среди конструкторов и специалистов по управлению растет осознание того, что, хотя различные части системы, например ракеты, могут исследоваться и анализироваться независимо, сама система должна проектироваться как единое целое. Этот аспект проектирования сложных систем приобрел важное значение и получил название "системного анализа", или "системотехники".См. также СИСТЕМОТЕХНИКА.Сложные системы управления. Любые самые сложные системы управления - будь то самолет, ядерный реактор или даже государство - включают функции оценки состояния, выработки сигнала обратной связи и управления. Главная задача любой системы управления - сделать выходные сигналы близкими к нужным значениям как можно быстрее и точнее. Другой важной характеристикой системы управления является ее устойчивость, т.е. ситуация, когда ее выходные сигналы не превышают заданных пределов. Следовательно, устойчивость, быстродействие и точность рассматриваются в качестве основных целей при проектировании эффективной системы управления. Однако в некоторых системах увеличение быстродействия сверх определенного предела может вызвать снижение точности и даже привести к неустойчивости. Поэтому достижение наилучшего соотношения между этими характеристиками является одной из важнейших задач проектирования системы управления. В динамической системе, т.е. в такой системе, характеристики которой изменяются в зависимости от времени и места, три фактора осложняют задачу управления: 1) система имеет большое число входов и выходов; 2) имеется неточность в измерении характеристик или знании системы; 3) поскольку характеристики системы все время изменяются, может оказаться затруднительным расчет требуемых управляющих сигналов. Чтобы количественно оценить влияние входов системы на ее выходы, нужна математическая модель этой системы. Для этого может быть применен компьютер. Вообще, компьютер используется во всех сложных системах, выполняя операции оценки состояния, выработки сигнала обратной связи и управления. В 1960-х годах были разработаны основы современной математической теории оптимального управления. Они позволяют генерировать управляющие сигналы, которые оптимизируют тот или иной показатель эффективности - например, время, энергию, расход топлива или стоимость - в больших системах, для которых могут быть разработаны точные математические модели.Адаптация, обучение и искусственный интеллект. В реальном мире большинство систем не только изменяются в зависимости от времени и места, но и не могут быть представлены точными математическими моделями. Необходимость управлять такими системами привела к созданию новых теорий адаптации, обучения и самоорганизации. Это, в свою очередь, привело к появлению сложных систем управления с обратной связью, в которых компьютер выполняет эксперименты над системой, исследует ее характеристики в процессе работы и меняет стратегию управления. Можно сказать, что такие системы управления имитируют адаптивные способности живых организмов в изменяющихся и неопределенных условиях среды. Таким образом, вообще говоря, адаптивная система управления требует двух различных операций: идентификации характеристик управляемой системы и настройки параметров управляющей системы с учетом динамики управляемой. Другой областью исследований, оказывающей существенное влияние на проектирование сложных автоматических систем, является теория обучения. Идеи, развитые в математической психологии, могут быть применены к проектированию систем, использующих обратную связь по состоянию, что позволяет выбрать оптимальное действие из конечного набора действий. Распознавание образов - одна из форм обучения, нашедшая применение в некоторых современных системах с обратной связью. Если управляемая система имеет конечное число состояний, а параметры оптимального управления, соответствующие каждому состоянию, сохраняются в памяти компьютера, то скорость адаптации системы управления может быть существенно повышена с помощью устройства распознавания. Например, на космическом корабле распознавание состояния по измерениям температуры, влажности, давления, вибраций, радиации и т.п. является задачей распознавания образов. Кроме исследований, упомянутых выше, многое делается в области разработки искусственного интеллекта, который включает более высокие уровни обратной связи, такие, как поиск информации, перевод с одного языка на другой, игры, доказательство теорем и решение комплексных проблем. Эти идеи начинают находить применение в различных областях современной науки и технологии. Электроника и компьютерные технологии, особенно разработка микропроцессоров, открыли новые пути применения теорий управления, основанных на сложных формах обратной связи. Человечество вступает в эру, где какие-либо применения будут ограничиваться только состоянием теории и воображением проектировщика.См. также ИНТЕЛЛЕКТ ИСКУССТВЕННЫЙ; КОМПЬЮТЕР; ЭЛЕКТРОННАЯ ПРОМЫШЛЕННОСТЬ; ИНФОРМАЦИИ НАКОПЛЕНИЕ И ПОИСК; ИНФОРМАЦИИ ТЕОРИЯ.ЛИТЕРАТУРА Нетушил А.В. и др. Теория автоматического управления. М., 1983 Абдуллаев Н.Д., Петров Ю.П. Теория и методы проектирования оптимальных регуляторов. Л., 1985 Первозванский А.А. Курс теории автоматического управления. М., 1986 Зайцев Г.Ф. Основы автоматического управления и регулирования. Киев, 1988 Поделитесь на страничкеslovar.wikireading.ru |
|
|||||||||||||||||
|
|
|||||||||||||||||
|

 Отёска стен и прирубка косяков - Когда на доме не достаёт окон и дверей, красивое высокое крыльцо ещё только в воображении, приходится подниматься с улицы в дом по трапу.
Отёска стен и прирубка косяков - Когда на доме не достаёт окон и дверей, красивое высокое крыльцо ещё только в воображении, приходится подниматься с улицы в дом по трапу. Дифференциальные уравнения второго порядка (модель рынка с прогнозируемыми ценами) - В простых моделях рынка спрос и предложение обычно полагают зависящими только от текущей цены на товар.
Дифференциальные уравнения второго порядка (модель рынка с прогнозируемыми ценами) - В простых моделях рынка спрос и предложение обычно полагают зависящими только от текущей цены на товар.