Содержание
Волновой двигатель — Большая Энциклопедия Нефти и Газа, статья, страница 1
Cтраница 1
Волновые двигатели имеют хорошие динамические характеристики. Время пуска микродвигателя с номинальной частотой / [ 50 Гц достигает 3 — 4 мс. Ротор имеет довольно малый момент инерции, вращается с низкой угловой скоростью, и быстродействие двигателя зависит в основном не от кинетической энергии вращения ротора, а от кинетической энергии перемещающихся в радиальном направлении масс деформирующегося ротора. Это значит, что время пуска определяется практически временем деформации ротора до зацепления венцов волновой передачи. При отключении, напряжения питания волна деформации исчезает так же быстро и ротор останавливается практически без выбега. В волновых двигателях при числе волн деформаций D 2 вращающиеся массы динамически уравновешены, что обеспечивает более низкий уровень вибрации, чем у двигателей с катящимся ротором.
[1]
Новый волновой двигатель, Доклады АН СССР, Нов.
[2]
В волновом двигателе гибкий ротор в силу особенности кинематической связи со статором ( зубчатое зацепление) не может вращаться со скоростью поля. Синхронно с полем перемещается вдоль расточки волна деформации гибкого ротора и происходит изменение проводимости рабочего зазора. Модуляция проводимости зазора обусловливает появление синхронного реактивного момента. Реактивный момент при врапХении поля стремится удержать ротор в таком положении, чтобы проводимость зазора на пути магнитного потока машины была максимальной.
[3]
Электромашинная часть волнового двигателя создает вращающий момент и является электромагнитным генератором механических волн деформации для волновой передачи.
[4]
Таким образом, реактивный волновой двигатель ( РВД) — двигатель без возбуждения и синхронный волновой двигатель ( СВД) — двигатель с возбуждением — являются электрическими машинами параметрического типа.
[5]
По своим характеристикам рассмотренный волновой двигатель является синхронным реактивным двигателем. Действительно, ось деформации гибкого ротора вращается синхронно с осью магнитного поля и частота вращения вала двигателя постоянна и находится в фиксированном соотношении ( 9) с частотой вращения поля статора. Деформированный ротор при этом, как нетрудно заметить, занимает положение, при котором магнитное сопротивление магнитному потоку минимально. Поэтому при появлении рассогласования ( несовпадении) оси поля статора и оси деформации ротора 1 которое наступает, например, при нагружении двигателя внешним моментом сопротивления, ротор двигателя начинает развивать синхронизирующий момент, как у обычного синхронного реактивного двигателя. Этот: момент уравновешивает приложенный внешний момент нагрузки, и двигатель продолжает вращаться со скоростью Пр при наличии некоторого пространственного углового сдвига между осями ротора и поля статора.
Действительно, ось деформации гибкого ротора вращается синхронно с осью магнитного поля и частота вращения вала двигателя постоянна и находится в фиксированном соотношении ( 9) с частотой вращения поля статора. Деформированный ротор при этом, как нетрудно заметить, занимает положение, при котором магнитное сопротивление магнитному потоку минимально. Поэтому при появлении рассогласования ( несовпадении) оси поля статора и оси деформации ротора 1 которое наступает, например, при нагружении двигателя внешним моментом сопротивления, ротор двигателя начинает развивать синхронизирующий момент, как у обычного синхронного реактивного двигателя. Этот: момент уравновешивает приложенный внешний момент нагрузки, и двигатель продолжает вращаться со скоростью Пр при наличии некоторого пространственного углового сдвига между осями ротора и поля статора.
[6]
| Синхронный волновой электродвигатель.
[7] |
Отмеченное свойство выгодно отличает волновой двигатель от ДКР. Однако необходимость обеспечения эластичности ротора в сочетании с требуемой толщиной маг-нитопровода определяет существенные конструктивные и технологические трудности в реализации волновых двигателей с высокими энергетическими и весовыми показателями.
Однако необходимость обеспечения эластичности ротора в сочетании с требуемой толщиной маг-нитопровода определяет существенные конструктивные и технологические трудности в реализации волновых двигателей с высокими энергетическими и весовыми показателями.
[8]
Рассмотрим некоторые практические конструкции волновых двигателей.
[9]
В зависимости от способа возбуждения волновые двигатели можно разделить на два типа: реактивные, у которых ротор намагничивается магнитным полем обмотки статора; с активным или возбужденным ротором с помощью обмотки постоянного тока, либо постоянным магнитом. В последнем случае обмотка постоянного тока выполняется в виде кольцеиой катушки, охватывающей ось вала и создающей униполярное аксиально-радиальное поле. Аналогичное поле создает также и постоянный магнит, выполняемый в виде полого цилиндра и намагничиваемый в аксиальном направлении.
[10]
В отличие от ДКР ротор волнового двигателя сбалансирован, вследствие этого в машине отсутствуют вибрации.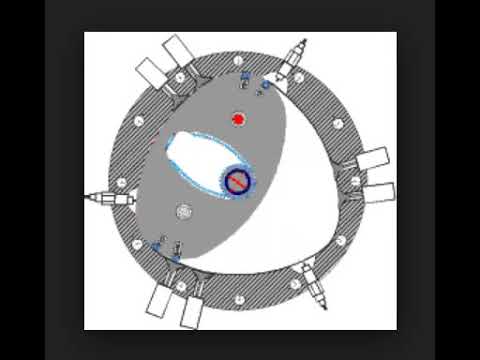 Однако необходимость иметь эластичный ротор вызывает значительные конструктивные и технологические трудности в реализации волновых электродвигателей с высокими энергетическими показателями. В данном случае число волн деформации U p и обмотка двухволнового двигателя должна быть четырехполюсной. Расчет момента волнового двигателя представляет собой довольно сложную задачу и в настоящей книге не рассматривается.
Однако необходимость иметь эластичный ротор вызывает значительные конструктивные и технологические трудности в реализации волновых электродвигателей с высокими энергетическими показателями. В данном случае число волн деформации U p и обмотка двухволнового двигателя должна быть четырехполюсной. Расчет момента волнового двигателя представляет собой довольно сложную задачу и в настоящей книге не рассматривается.
[11]
В отличие от ДКР ротор волнового двигателя сбалансирован, вследствие этого в машине отсутствуют вибрации. Однако необходимость иметь эластичный ротор вызывает значительные конструктивные и технологические трудности в реализации волновых электродвигателей с высокими энергетическими показателями. В данном случае число волн деформации и р, и обмотка для получения двухволнового двигателя должна быть четырехполюсной. Расчет момента волнового двигателя представляет собой довольно сложную задачу и в настоящей книге не рассматривается.
[12]
На рис. 42.5 изображена конструктивная схема синхронного волнового двигателя, состоящего из: шихтованного статора / с многофазной обмоткой, жесткого зубчатого колеса 2 волновой передачи, закрепленного по внутренней окружности статора, зубчатого венца 3 на поверхности гибкого магнито-провода ротора в виде тонкого пакета 4, навитого в несколько слоев из стальной ленты. Этот пакет с венцом зубьев закрепляется на тонкостенном стальном цилиндре с дном, насаженным на вал 5 двигателя. Ввиду гибкой конструкции ротор имеет возможность деформироваться в радиальном направлении под влиянием магнитных сил вращающегося поля в воздушном зазоре, создаваемого многофазной обмоткой статора.
42.5 изображена конструктивная схема синхронного волнового двигателя, состоящего из: шихтованного статора / с многофазной обмоткой, жесткого зубчатого колеса 2 волновой передачи, закрепленного по внутренней окружности статора, зубчатого венца 3 на поверхности гибкого магнито-провода ротора в виде тонкого пакета 4, навитого в несколько слоев из стальной ленты. Этот пакет с венцом зубьев закрепляется на тонкостенном стальном цилиндре с дном, насаженным на вал 5 двигателя. Ввиду гибкой конструкции ротор имеет возможность деформироваться в радиальном направлении под влиянием магнитных сил вращающегося поля в воздушном зазоре, создаваемого многофазной обмоткой статора.
[13]
| Распределение индукции и силы магнитного притяжения.
[14] |
Отметим в заключение, что широкое применение волновых двигателей ограничивается сложностью конструкции и технологии изготовления эластичного ротора.
[15]
Страницы:
1
2
3
Роторно-волновой двигатель — Энергетика и промышленность России — № 4 (68) апрель 2006 года — WWW.EPRUSSIA.RU
http://www.eprussia.ru/epr/68/4662.htm
Газета «Энергетика и промышленность России» | № 4 (68) апрель 2006 года
Ни для кого не секрет, что 60‑70 % теплоты, вырабатываемой в настоящее время двигателями внутреннего сгорания, просто выбрасывается в атмосферу. В будущем же энергетика уже не сможет мириться с такими огромными потерями. Тогда, несомненно, будут востребованы только те технические решения, которые смогут преодолеть основные недостатки известных тепловых машин.
Такие решения должны использовать плюсы существующих агрегатов: высокую экономичность дизелей; неограниченную мощность, малые габариты и вес газовых турбин; эффективное использование рабочего объема бензинового двигателя; бесшумность, многотопливность и высокий крутящий момент паровой машины и стирлинга; отсутствие органов газораспределения широко разрекламированного двигателя Ф. Ванкеля; высокий механический КПД и способность двигателя выполнять функции редуктора в нашумевшем бесшатунном двигателе С. Баландина и в малоизвестной конструкции Е. Льва; низкую токсичность выхлопа в двигателе В. Кушуля.
Ванкеля; высокий механический КПД и способность двигателя выполнять функции редуктора в нашумевшем бесшатунном двигателе С. Баландина и в малоизвестной конструкции Е. Льва; низкую токсичность выхлопа в двигателе В. Кушуля.
В тепловой машине, основанной на перечисленных преимуществах, можно будет полностью или частично отказаться от охлаждения и смазки, убрать глушитель шума и маховик. При этом деталей в ней будет не больше, чем в двухтактном мотовелодвигателе.
На современном этапе развития техники эта задача может быть решена только с помощью качественно новых конструктивных решений. Например, с помощью роторно-волнового двигателя (РВД) – объемной прямоточной машины, воспроизводящей последовательность работы газотурбинного двигателя (патент РФ № 2155272).
Принцип «движущихся» волн
В этом агрегате совершенно устранено возвратно-поступательное движение рабочих органов, ротор полностью уравновешен и вращается с постоянной угловой скоростью. Рабочее тело, как и в турбине, движется вдоль оси двигателя; траектория движения – винтовая линия. В конструкции нет вредного пространства, ограничивающего рост степени сжатия рабочего тела. Из‑за отсутствия уплотнительных элементов и, соответственно, трения в проточной части снимаются ограничения по ресурсу и числу оборотов двигателя. Есть возможность произвольно изменять степень сжатия и расширения рабочего тела, а также без дополнительных регулировок и остановки двигателя осуществлять переход на любой сорт топлива.
В конструкции нет вредного пространства, ограничивающего рост степени сжатия рабочего тела. Из‑за отсутствия уплотнительных элементов и, соответственно, трения в проточной части снимаются ограничения по ресурсу и числу оборотов двигателя. Есть возможность произвольно изменять степень сжатия и расширения рабочего тела, а также без дополнительных регулировок и остановки двигателя осуществлять переход на любой сорт топлива.
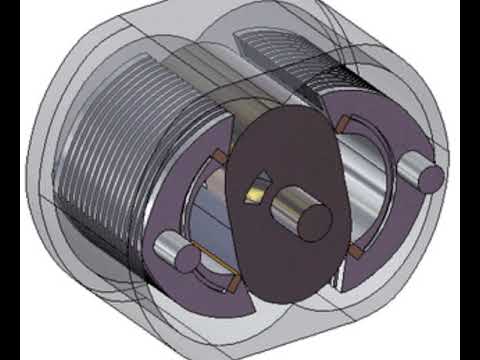
Оригинальная кинематическая схема и оптимальный рабочий процесс роторного двигателя позволяют связать в одной конструкции положительные стороны всех известных ДВС. В основе кинематики РВД лежит сферический механизм, при этом оси его основных деталей пересекаются в одном месте – центре воображаемой сферы.
Установленный с минимальным зазором конический винтовой ротор совмещает вращение с противоположным ему планетарным обкатыванием по внутренним огибающим корпуса. Накладывая два эти вида движения на любые сечения ротора (кроме центра – точки его перегиба), можно увидеть, что они совершают в определенной последовательности равные угловые колебания в пазах корпуса, образуя волны, которые последовательно перекатываются по ходу винтовых поверхностей корпуса. Аналогичный процесс можно видеть на море в ветреную погоду, наблюдая за перемещением волн в «стоячей» воде.
Аналогичный процесс можно видеть на море в ветреную погоду, наблюдая за перемещением волн в «стоячей» воде.
В компрессорном отсеке формирование и движение волн начинаются от периферии по направлению к центру, а в расширительном отсеке – наоборот, от центра к периферии.
Как действует РВД?
Ротор и вал отбора мощности соединяются между собой в центре двигателя шарниром Гука, который можно назвать шарниром равных угловых скоростей (ШРУСом). Необходимое же ротору «дополнительное» обкатывание по внутренним огибающим корпуса задается вспомогательным устройством – так называемым «генератором волн». Его основной элемент – вращающийся на основном валу эксцентрик, с приводом через блок шестерен все от того же вала. Эксцентрик, наклоняя ротор на угол от 3 до 6 градусов, обеспечивает качание сечениям ротора в пределах от 12 до 24 градусов. В такой комплектации расчетный механический КПД двигателя составит невиданную цифру – 97 %.
С началом вращения винтовые поверхности ротора начинают открывать внутренние полости винтовых каналов компрессорного отсека, заталкивая в них воздух двумя потоками, смещенными относительно друг друга на 180°. За один оборот ротора в оба канала компрессорного отсека засасываются и отсекаются от впускного тракта по две порции воздуха. При дальнейшем повороте каждая порция воздуха начнет самостоятельно перемещаться к центру двигателя, непрерывно сокращаясь в объеме за счет уменьшения шага и амплитуды самого витка. Процесс сжатия будет продолжаться до тех пор, пока все уменьшающийся объем со сжатым воздухом не подойдет к камере сгорания. В этот момент процесс внутреннего сжатия воздуха в компрессорном отсеке закончится, и наступает следующий этап – выталкивание сжатого воздуха в камеру сгорания тыльной стороной витка, ближе других находящегося к центру ротора. Этот процесс сопровождается непрерывным распылением топлива в воздушном потоке с последующим его сгоранием в общей камере, куда и уходят все порции воздуха.
За один оборот ротора в оба канала компрессорного отсека засасываются и отсекаются от впускного тракта по две порции воздуха. При дальнейшем повороте каждая порция воздуха начнет самостоятельно перемещаться к центру двигателя, непрерывно сокращаясь в объеме за счет уменьшения шага и амплитуды самого витка. Процесс сжатия будет продолжаться до тех пор, пока все уменьшающийся объем со сжатым воздухом не подойдет к камере сгорания. В этот момент процесс внутреннего сжатия воздуха в компрессорном отсеке закончится, и наступает следующий этап – выталкивание сжатого воздуха в камеру сгорания тыльной стороной витка, ближе других находящегося к центру ротора. Этот процесс сопровождается непрерывным распылением топлива в воздушном потоке с последующим его сгоранием в общей камере, куда и уходят все порции воздуха.
Для первоначального поджигания топливо-воздушной смеси в камере устанавливается запальная свеча. После запуска дальнейшее поджигание смеси должно поддерживаться газами, оставшимися от предыдущих циклов в общей камере сгорания.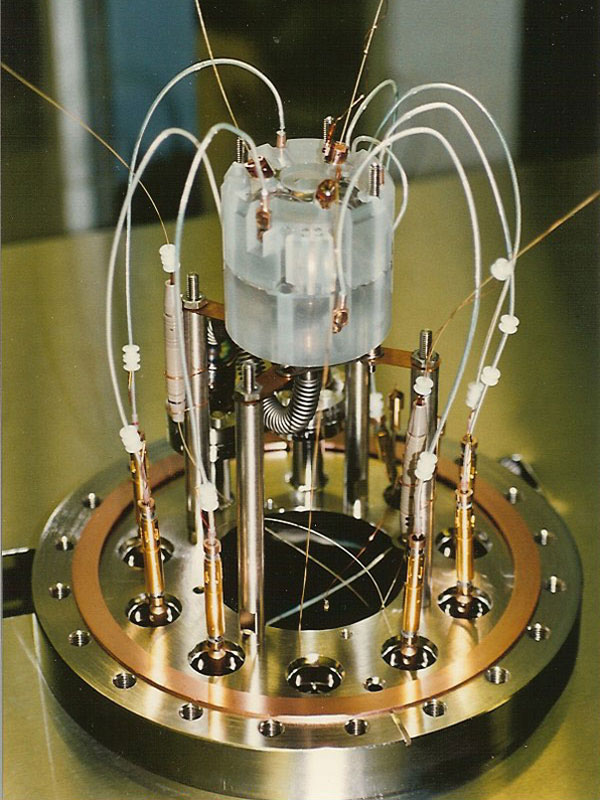 Последние, с высокой температурой и давлением, покидая камеру сгорания, заполняют на роторе винтовые каналы расширительных отсеков, расположенных по другую сторону от центра ротора (точки, где шаг и амплитуда угловых колебаний равна нулю).
Последние, с высокой температурой и давлением, покидая камеру сгорания, заполняют на роторе винтовые каналы расширительных отсеков, расположенных по другую сторону от центра ротора (точки, где шаг и амплитуда угловых колебаний равна нулю).
С поворотом последнего происходит увеличение объемов расширительных отсеков – за счет чего и осуществляется рабочий ход. На момент максимального расширения кромки наружных витков ротора открываются и газы сначала свободно, а затем принудительно выходят в выпускной коллектор. Интервал выпуска отработанных газов из очередной камеры расширения составит 180°. Часть полученной в цикле мощности возвращается телом ротора в компрессорный отсек.
Двигатель – сам себе редуктор
Описанный рабочий процесс соответствует самой простой конструкции, в которой двухзаходный корпус работает в паре с однозаходным ротором. Рост же числа заходов неизбежно приводит к усложнению формы корпуса и ротора, которые между собой будут соотноситься в пропорции: 2/1, 3/2, 4/3, 5/4 и т. д. Поперечные сечения тел ротора и корпуса во всех случаях будут иметь гипотрохоидные формы с внешними огибающими.
д. Поперечные сечения тел ротора и корпуса во всех случаях будут иметь гипотрохоидные формы с внешними огибающими.
Рассмотренный тип двигателя, в основе которого лежит внутреннее винтовое зацепление ротора с корпусом, образует новое семейство прямоточных коловратных машин: в нем с увеличением числа заходов ротора и корпуса угловая скорость ротора и, соответственно, вала отбора мощности, оборудованного ШРУСом, будет падать с одновременным ростом величины крутящего момента.
Эта замечательная особенность кинематической схемы РВД позволит многозаходному ротору «по совместительству» выполнять еще и функцию понижающего редуктора. Ведь не секрет, что рост мощности двигателя всегда идет по пути увеличения рабочих оборотов (больше‑то некуда), а потребители энергии, будь то винт судна или автомобильное колесо, остаются практически неизменными. Поэтому приходится ставить дополнительные редукторы для снижения оборотов. А здесь – двигатель сам себе редуктор.
Функция редуктора во многозаходных конструкциях возложена на механизм синхронизации, состоящий из неподвижного венца с внутренним зацеплением и меньшей по диаметру планетарной шестерни с внешним зацеплением, жестко соединенной с ротором. Количество зубьев венца в шестерне всегда должно соответствовать выбранной пропорции корпуса к ротору. Иначе нельзя: только этим достигается синхронизация и требуемое трохоидное движение ротора. Каждому новому обкатыванию шестерни ротора будет соответствовать ее поворот на фиксированный вместе с ротором угол. Для двухзаходного ротора, работающего в паре с трехзаходным корпусом, на одно обкатывание шестерни приходится поворот ротора в корпусе на 50 %, в трехзаходном варианте ротора – на 33 %, в четырехзаходном – на 25 % и т. д.
Количество зубьев венца в шестерне всегда должно соответствовать выбранной пропорции корпуса к ротору. Иначе нельзя: только этим достигается синхронизация и требуемое трохоидное движение ротора. Каждому новому обкатыванию шестерни ротора будет соответствовать ее поворот на фиксированный вместе с ротором угол. Для двухзаходного ротора, работающего в паре с трехзаходным корпусом, на одно обкатывание шестерни приходится поворот ротора в корпусе на 50 %, в трехзаходном варианте ротора – на 33 %, в четырехзаходном – на 25 % и т. д.
Если изначально однозаходный ротор, работающий в паре с двухзаходным корпусом, эквивалентен восьмицилиндровому поршневому ДВС, то уже двухзаходный ротор в паре с трехзаходным корпусом эквивалентны 24‑цилиндровому ДВС! Дальше – больше. Трехзаходный ротор соответствует 48-цилиндровому поршневому ДВС, четырехзаходный – 80-цилиндровому ДВС и т. д.
Для четырехзаходного ротора, у которого будет несколько меньший механический КПД (94‑95 %), расчетный крутящий момент на выходном валу увеличится по сравнению с поршневым аналогом с 16 до 21 раза.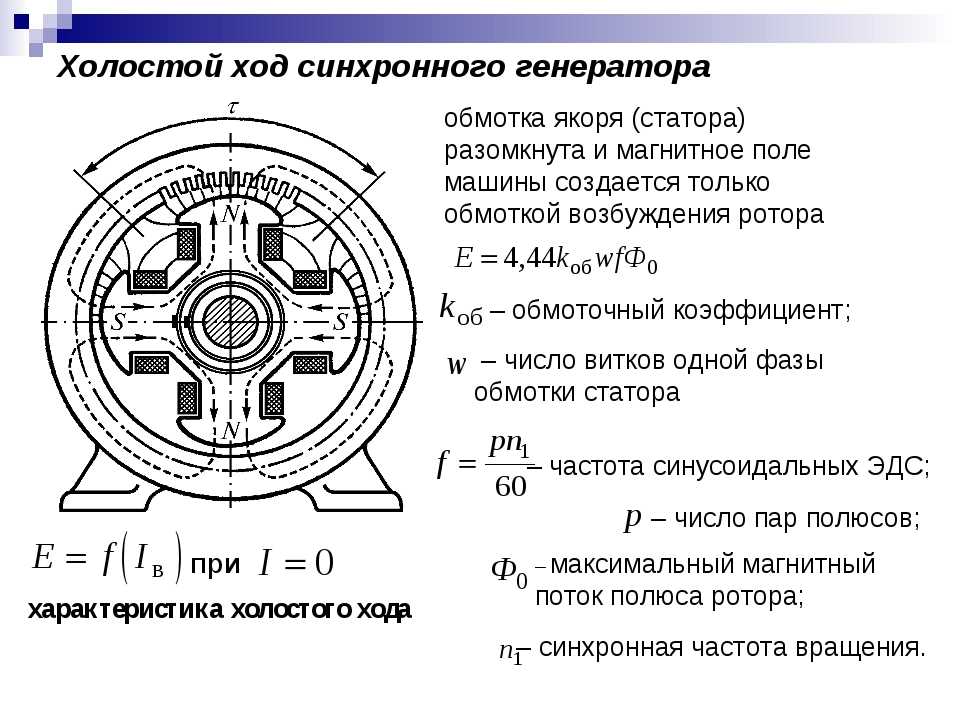 Причем – при равных с ним оборотах и литраже двигателя. Это – для автомобильного варианта, например, – само по себе уже не требует установки коробки передач, которая повышает крутящий момент двигателя всего в 4‑10 раз.
Причем – при равных с ним оборотах и литраже двигателя. Это – для автомобильного варианта, например, – само по себе уже не требует установки коробки передач, которая повышает крутящий момент двигателя всего в 4‑10 раз.
В новом двигателе ротор, производя полный оборот, вынужден при этом совершать четыре полных обкатывания по внутренним огибающим корпуса. Соответственно, при 2500 об/мин каждый из пяти винтовых каналов корпуса должен впустить по 10000 объемов воздуха, что в сумме составит 50000 объемов в минуту. Для сравнения: у аналогичного одноцилиндрового четырехтактного ДВС при равном числе оборотов количество тактов всасывания наполнит 625 рабочих объемов двигателя (каждый четвертый такт – всасывание). Отсюда и получается восьмидесятикратная разница. А учитывая низкий коэффициент наполнения безнаддувного поршневого двигателя (85% против 100‑105% в РВД), фактическое преимущество увеличится до 94 раз. При этом мы не учли еще разницу в механическом КПД поршневого ДВС и РВД (85% против 94%)./mf4176.jpg) Но ее соотнесем на протечки рабочего тела через «неплотности» ротора.
Но ее соотнесем на протечки рабочего тела через «неплотности» ротора.
Осталось упомянуть и о предельно допустимых оборотах РВД. Современный поршневой ДВС применяет 4500‑6000 об/мин. Аналогичная по мощности газовая турбина свободно раскручивается до 50000‑70000 оборотов. РВД занимает промежуточное положение – от 2500 до 30000 оборотов (все зависит от количества заходов ротора).
Воздух на шарнирах
В рабочих отсеках РВД одновременно может сжиматься и расширяться от нескольких единиц до нескольких десятков объемов воздуха. А то место, где ротор приближается, едва не касаясь поверхностью на минимальное расстояние к корпусу, – как раз и является подвижной разделительной линией между последовательно движущимися камерами. За каждый оборот ротора степень сжатия (расширения) изменяется в 4‑5 раз. Теоретическая же степень сжатия (расширения) в одном агрегате может достигать ста единиц (все зависит от количества витков), и это при полном отказе от уплотнительных элементов, роль которых выполняет тело ротора.
Ротор, освобождаясь от механического трения, «завинчивает» порции воздуха в камеру сгорания, нигде не касаясь стенок корпуса, – поэтому отпадает и необходимость в смазке рабочих отсеков двигателя. Трение остается лишь в подшипниках качения, на которые опирается ротор за пределами горячих зон и в ШРУСе. Последний конструктивно позволяет передавать весь поток мощности от ротора выходному валу фактически без потерь (достаточно вспомнить, что механический КПД широко используемых в технике ШРУСов очень высок и колеблется при малых углах качания от 99 до 99,5 %). Кроме того, шарнирное соединение автоматически точно центрирует ротор в любом его положении, а сам шарнир, расположенный в центре двигателя, надежно защищен от теплового воздействия камеры сгорания необходимой толщиной сферического теплового экрана.
Время работы двигателя увеличивается
Таким образом, в РВД ничто не препятствует применению очень высоких оборотов: ротор вращается с постоянной угловой скоростью, он прекрасно уравновешивается, вместо клапанов (или даже окон) в конструкции используются каналы неограниченной пропускной способности для непрерывного поступления воздуха в рабочие отсеки двигателя. Отсутствие трения снимает также ограничения по износу деталей и ресурсу двигателя в целом. В двигателе будут изнашиваться только подшипники, а для них ресурс в 30‑40 тыс. рабочих часов – не предел.
Отсутствие трения снимает также ограничения по износу деталей и ресурсу двигателя в целом. В двигателе будут изнашиваться только подшипники, а для них ресурс в 30‑40 тыс. рабочих часов – не предел.
Заметим, что хороший автомобильный двигатель в наше время имеет моторесурс 5000‑7000 часов до первого ремонта. В то же время автомобильные РВД при неограниченной мощности окажутся долговечнее даже, чем рама автомобиля (т. е. самое долговечное, что в нем есть).
Рабочий процесс для камеры постоянного сгорания позволяет, не останавливая двигатель, подавать в него любой вид жидкого, газообразного или даже твердого распыленного топлива – явное преимущество перед турбинами, дизельными и карбюраторными двигателями.
В кинематических звеньях механизмов поршневых и роторных ДВС есть так называемые «мертвые точки». Для их преодоления за двигателем устанавливается значительный по массе маховик. В РВД же газовые силы, действующие на ротор, направлены всегда по касательной к его поверхности, они постоянны и непрерывны, что делает совершенно не нужной установку маховика, а в некоторых случаях – и противовесов, применяемых для полного уравновешивания двигателя.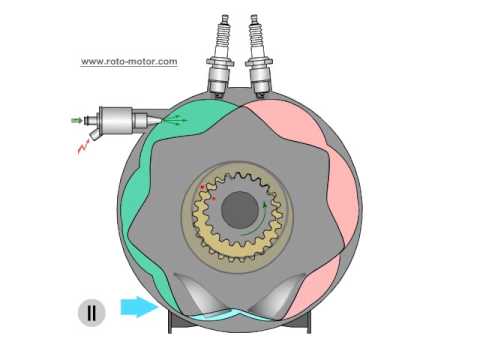
Компоновочная схема компрессорного и расширительного отсеков РВД такова, что допускает также, без остановки двигателя, в широких пределах изменять степень сжатия и расширения рабочего тела, в том числе – до полного расширения отработанных газов, когда отпадает необходимость в глушителе шума. При этом не только исчезает значительное сопротивление, которое создает глушитель, отнимая у двигателя до 10 % его мощности, но и в процессе продолженного расширения, выделяется еще 10‑15 % дополнительной энергии.
Наконец, главный резерв повышения КПД роторно-волнового двигателя – применение в конструкции керамических материалов: жаропрочных теплоизолированных покрытий, позволяющих отказаться от системы охлаждения. Это позволяет новым агрегатам заменить собой сложнейшие турбокомпаундные двигатели. Причем используются только те свойства керамики, которыми она всегда обладала, – способность работать на сжатие, умеренное растяжение при стабильной температуре и давление во всех сечениях корпуса и ротора.
В заключение приведем еще несколько цифр. Расчетный индикаторный КПД простого цикла РВД в адиабатном исполнении и при весьма умеренной степени сжатия, равной 15 со степенью расширения 36, составит 51 %. Соответственно, расход топлива в этом случае может составить 171 г/кВт при удельном весе силовой установки 0,15‑0,25 кг/кВт.
Для сравнения: в дизельном двигателе, использующем такую же степень сжатия, расход топлива составляет 224 г / кВт при удельном весе 3,5‑15 кг/кВт.
А за счет дальнейшего увеличения степени сжатия в РВД и использования в нем системы регенерации отработанных газов (для возврата теряемой с отработанными газами теплоты) индикаторный КПД теплового цикла можно увеличить еще более значительно.
Там, где требуется получить максимальный расход воздуха и огромные мощности, например в авиационных двигателях и судовых установках, выгоднее использовать многозаходные кинематические схемы, ограниченные по росту степени сжатия. Если главным фактором выступает экономичность, перспективней использовать двух-трехзаходные схемы роторов, как наиболее простые и допускающие наибольшую степень сжатия и расширения рабочего тела.
Необходимо признать, что на данный момент сильно отстает технологическая база предприятий, которые можно привлекать для изготовления подобного класса машин. Но вместе с тем интенсивное развитие компьютерного проектирования способно решить многие технические вопросы, открывая тем самым благоприятные условия для создания высокоэкономичных и экологически безопасных энергетических установок, какими являются роторно-волновые двигатели.
Также читайте в номере № 4 (68) апрель 2006 года:
-
Выработка электроэнергии
станциями региональных генерирующих компаний (РГК), входящих в конфигурацию ОАО «Территориальная генерирующая компания № 4», в январе 2006 г. составила 1674 млн. кВт-ч электроэнергии, что на 2,4% выше запланированного. Значительно превысили п…
-
Как обесточить Америку
История «энергетических скандалов», потрясающих Европу и Америку в последние годы, и их освещение в прессе – наглядное отражение страхов и опасностей, которые угрожают ставшему очень тесным миру.
 Один из самых мощных страхов – стра…
Один из самых мощных страхов – стра… -
Интенсивная разведка нефтяных месторождений в Арктике
Норвегия поступится своими экологическими принципами и начнет интенсивную разведку новых нефтяных месторождений в Арктике. Правительство решило увеличить добычу нефти. Неприкосновенной остается пятидесятикилометровая прибрежная зона,…
-
Дирижабли: назад в будущее?
В начале 2005 года мы опубликовали статью В. К. Борина, посвященную возможности использования в качестве транспортного средства… паровозов и турбовозов, давно, казалось бы, ушедших в прошлое. Смешно, не правда ли? В адрес редакции поступило не…
-
Правила «перекрестка» – отказаться или ужесточить
Термин «перекрестное субсидирование» в Стратегии реформирования РАО «ЕЭС России» трактуется как «покрытие убытков, возникающих из‑за низких тарифов для одной из групп потребителей (население, потребители, финансируемые из бюджетов ра…
 Один из самых мощных страхов – стра…
Один из самых мощных страхов – стра…
Смотрите и читайте нас в
О компании — Wave Engine Corp.
 управления для разработки авиационной силовой установки будущего. Основанная в районе метро Балтимор-Вашингтон, мы представляем собой целеустремленную группу ученых, инженеров, слесарей и бывших руководителей аэрокосмической и оборонной промышленности из списка Fortune 500, которая работает над тем, чтобы обеспечить следующий ренессанс в аэрокосмической отрасли.
управления для разработки авиационной силовой установки будущего. Основанная в районе метро Балтимор-Вашингтон, мы представляем собой целеустремленную группу ученых, инженеров, слесарей и бывших руководителей аэрокосмической и оборонной промышленности из списка Fortune 500, которая работает над тем, чтобы обеспечить следующий ренессанс в аэрокосмической отрасли.
Дааниш Макбул
Главный исполнительный директор
Д-р Макбул является генеральным директором Wave Engine Corp., руководя техническими и корпоративными усилиями с момента основания компании. Он обладает более чем десятилетним опытом разработки силовых и двигательных систем в Университете Мэриленда и Массачусетском технологическом институте. Доктор Макбул имеет докторскую степень. получил степень бакалавра аэрокосмической техники в Университете Мэриленда.
Эндрю Гелтман
Вице-президент по производству
Г-н Гелтман занимает должность вице-президента по эксплуатации Wave Engine Corp. и отвечает за административную, финансовую и юридическую деятельность. До своей нынешней должности г-н Гельтман был научным сотрудником по связям с государственными органами в Merck и Cubist Pharmaceuticals, отвечая за участие правительства, государственную политику и вопросы интеллектуальной собственности. Г-н Гелтман имеет степень доктора права юридического факультета Мэрилендского университета.
и отвечает за административную, финансовую и юридическую деятельность. До своей нынешней должности г-н Гельтман был научным сотрудником по связям с государственными органами в Merck и Cubist Pharmaceuticals, отвечая за участие правительства, государственную политику и вопросы интеллектуальной собственности. Г-н Гелтман имеет степень доктора права юридического факультета Мэрилендского университета.
Bert VanDerHeiden
Главный операционный директор
Д-р VanDerHeiden является главным операционным директором Wave Engine Corp. Он обладает более чем тридцатилетним техническим и руководящим опытом в аэрокосмической и оборонной промышленности. Совсем недавно он был вице-президентом по военному и пусковому сегменту в Northrop Grumman, где курировал портфель проектов стоимостью 600 миллионов долларов, включающий 50 программ, включая программы F-35, F-22 и THAAD. Доктор ВандерХейден имеет докторскую степень. по физике из Университета Юты.
Уэйн Кеннард
Главный юрисконсульт
Г-н Кеннард является главным юрисконсультом корпорации Wave Engine, где он управляет юридическими вопросами компании и портфелем интеллектуальной собственности.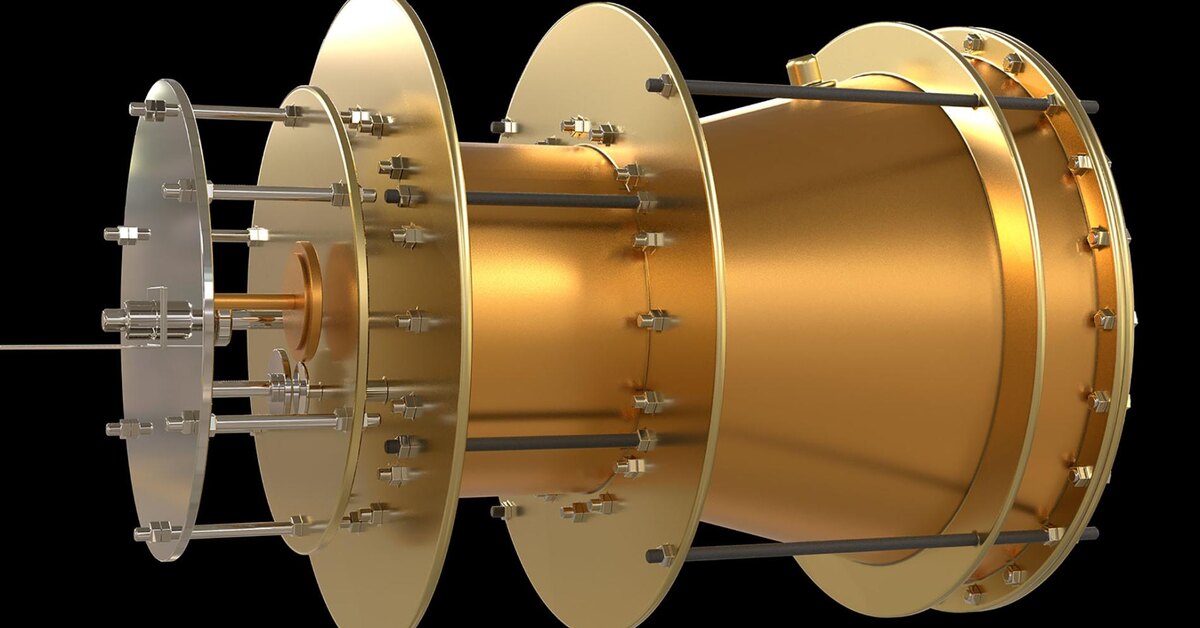 До своей нынешней должности он был старшим партнером в WilmerHale, где специализировался на представлении интересов высокотехнологичных компаний по широкому кругу вопросов корпоративного права, интеллектуальной собственности и лицензирования. Г-н Кеннард имеет степень доктора права юридического факультета Университета Джорджа Вашингтона.
До своей нынешней должности он был старшим партнером в WilmerHale, где специализировался на представлении интересов высокотехнологичных компаний по широкому кругу вопросов корпоративного права, интеллектуальной собственности и лицензирования. Г-н Кеннард имеет степень доктора права юридического факультета Университета Джорджа Вашингтона.
Гэри Замероски
Вице-президент по развитию бизнеса и директору по стратегии
Г-н Замероски является вице-президентом по развитию бизнеса и директором по стратегии в Wave Engine Corp., где он управляет бизнес-стратегией, связями с общественностью и партнерскими усилиями. Он занимал руководящие должности в GE Aviation, Textron, Airbus и совсем недавно в Honeywell Aerospace, где руководил стратегическим бизнес-подразделением стоимостью 6 млрд долларов США по стратегии, инновациям и маркетингу. Г-н Замероски является аэрокосмическим инженером, летчиком и имеет ученые степени Американского и Джорджтаунского университетов в Вашингтоне, округ Колумбия.
Дааниш Макбул
Генеральный директор Wave Engine Corp.
Доктор Макбул руководил техническими и корпоративными усилиями Wave Engine Corp. с момента основания компании. Он обладает более чем десятилетним опытом разработки силовых и двигательных систем в Университете Мэриленда и Массачусетском технологическом институте.
Эйлин О’Рурк
Финансовый директор Фонда Абелл (наблюдатель)
Г-жа О’Рурк является финансовым директором Фонда Абелл. Она управляет финансовыми операциями Фонда и влияет на инвестиционный портфель инновационных технологий. Она занимала руководящие должности в компаниях KPMG и Legg-Mason, Inc. и обладает более чем тридцатилетним опытом работы в сфере финансов и управления бизнесом.
Берт ВанДерХайден
Главный операционный директор Wave Engine Corp. и бывший вице-президент Northrop Grumman
Доктор ВанДерХайден обладает более чем тридцатилетним техническим и руководящим опытом в аэрокосмической и оборонной промышленности.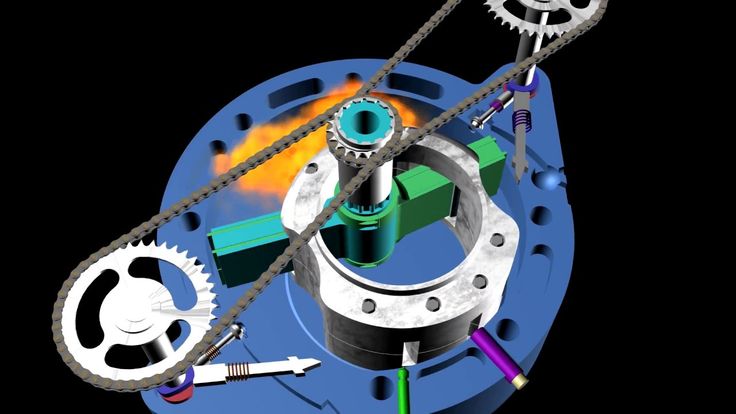 Совсем недавно он был вице-президентом по военному и пусковому сегменту в Northrop Grumman, где курировал портфель проектов стоимостью 600 миллионов долларов, включающий 50 программ, включая программы F-35, F-22 и THAAD.
Совсем недавно он был вице-президентом по военному и пусковому сегменту в Northrop Grumman, где курировал портфель проектов стоимостью 600 миллионов долларов, включающий 50 программ, включая программы F-35, F-22 и THAAD.
Патрик Дагган
Управляющий директор, Gula Tech Adventures
Полковник (справа) Патрик Дагган — управляющий директор Gula Tech Adventures, где он имеет более чем 25-летний опыт работы в коммерческом, государственном и оборонном секторах. Пэт — зеленый берет на пенсии, успешный руководитель в области технологий и бывший директор Совета национальной безопасности в Белом доме.
Гур Кимчи
Бывший вице-президент Amazon Prime Air
Г-н Кимчи стал соучредителем Prime Air, автономной платформы воздушной логистики Amazon, и руководил Amazon Prime Air, пройдя сертификацию FAA Part 135 Air-Carrier. Он также был одним из основателей Консультативного комитета FAA по дронам, занимал руководящие должности в Microsoft и VocalTec и был членом совета директоров Waze до ее приобретения Google.
Первый полномасштабный прототип двигателей разработан и испытан в Университете Мэриленда.
Усовершенствования в области разработки и тестирования с помощью специального испытательного стенда и поддержки со стороны корпорации по развитию технологий штата Мэриленд (TEDCO).
Корпорация Wave Engine собирает 1,45 миллиона долларов в рамках посевного раунда с участием Maryland Momentum Fund, Abell Foundation и Gula Tech Adventures.
Корпорация Wave Engine получает от Агентства перспективных исследовательских проектов Министерства обороны (DARPA) грант в размере 2,85 млн долларов на продолжение разработки двигателей для высокопроизводительных БПЛА.
Первый пилотируемый самолет с двигательной установкой Wave Engine Corp. поднимается в воздух, что означает значительный скачок в технологической готовности.
Корпорация Wave Engine заключила контракт с ВВС США на начало разработки первого транспортного средства Wave Engine Corp., универсальной платформы воздушного базирования (VALP).
Ссылка для загрузки страницы Перейти к началу
Профиль компании Wave Engine: Оценка и инвесторы
Обзор волнового двигателя
- Основан
-
2016
- Статус
-
Частный
- Сотрудники
-
8
- Тип последней сделки
-
Семена
- Сумма последней сделки
-
3,89 млн долларов
- Инвесторы
-
13
Временная шкала Wave Engine
2019202020212022
Финансирование RoundCaptured Количество сотрудников Расчетный рост сотрудников
Хотите получить подробную информацию о компаниях 3M+?
То, что вы здесь видите, царапает поверхность
Запросить бесплатную пробную версию
Хотите покопаться в этом профиле?
Мы поможем вам найти то, что вам нужно
Узнать больше
Оценка и финансирование Wave Engine
| Тип сделки | Дата | Сумма | Поднят до даты | Пост-Вал | Статус | Сцена |
|---|---|---|---|---|---|---|
7. Семенной раунд Семенной раунд |
15 июня 2022 г. | 3,89 млн долларов | 00.000 | 000,00 | Завершено | Получение дохода |
| 6. Вторичная транзакция — частная | 01 марта 2022 | 00.000 | Завершено | Получение дохода | ||
| 5. Грант | 01 января 2021 | 000000 | 00.000 | Завершено | Получение дохода | |
| 4. Грант | 01 января 2020 | 00.000 | 00.000 | Завершено | Получение дохода | |
| 3. Грант | 01 января 2019 | 00000 | 00.000 | Завершено | Получение дохода | |
| 2. Ранняя стадия VC | 04 апреля 2018 | 1,45 млн долларов | 1,45 млн долларов | Завершено | Получение дохода | |
1. Ранняя стадия VC Ранняя стадия VC |
05 октября 2016 г. | Завершено | Запуск |
Чтобы просмотреть полную историю оценки и финансирования Wave Engine, запросите доступ »
Столик крышки волнового двигателя
| Наличие | Количество акций Разрешено |
Номинальная стоимость | Ставка дивидендов (%) | Оригинал Цена выпуска |
Ликвидация | Ликвидация Преф. Несколько |
Цена конвертации | % принадлежит |
|---|---|---|---|---|---|---|---|---|
| Семена | 0 000 000 | 00.000000 | 00.00 | 00.00 | 00 | 00.00 | 00.00 | |
| Семя-2 | 0 000 000 | 00.000000 | 00.00 | 00.00 | 00 | 00.00 | 00.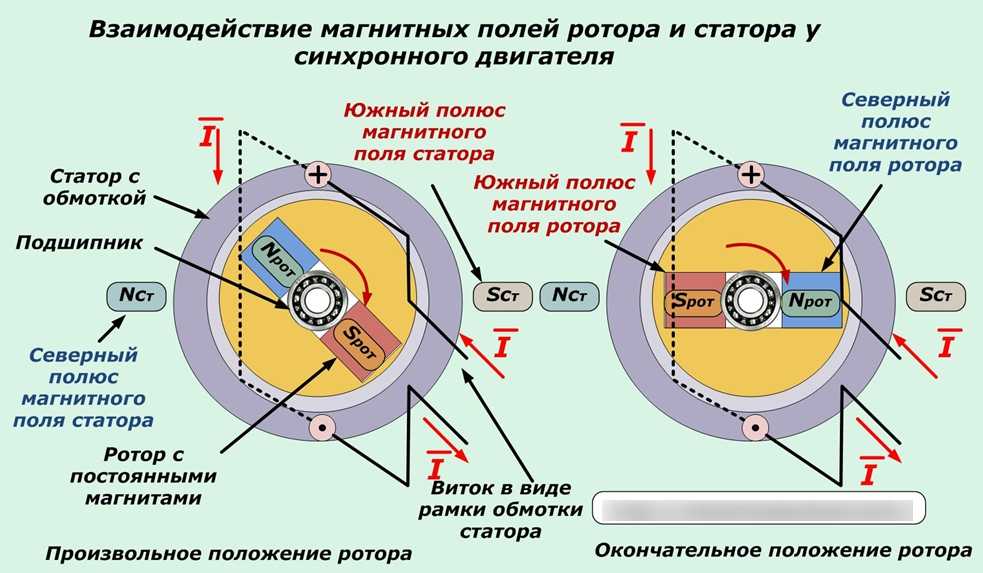 000 000 |
|
| Семена-1 | 52 413 | $0,000100 | 1,5 $ | 1,5 $ | 1x | 1,5 $ | 0,71% |
Чтобы просмотреть полную историю таблицы капиталовложений Wave Engine, запросите доступ »
Патенты волнового двигателя
-
23
Всего документов
Заявки и гранты -
000
Всего патентов
Семьи -
4
Предоставленный
-
000
В ожидании
-
000
истекает
в следующие 12 мес.
Недавняя патентная активность Wave Engine
| Идентификатор публикации | Название патента | Статус | Дата первой подачи | Технология (КПК) | Цитаты |
|---|---|---|---|---|---|
| США-20200003158-А1 | Повышение производительности импульсной камеры сгорания при скорости полета | Неактивен | 28 июня 2018 г. |
00000000 | |
| EP-3781868-A1 | Способ и устройство для запуска и управления импульсными камерами сгорания с использованием селективной форсунки | Активный | 17 апреля 2018 г. | 00000000 | |
| EP-3781868-B1 | Способ и устройство для запуска и управления импульсными камерами сгорания с использованием селективной форсунки | Активный | 17 апреля 2018 г. | 00000000 | |
| США-20200256260-А1 | Способ и устройство для запуска и управления импульсными камерами сгорания с использованием селективной форсунки | В ожидании | 17 апреля 2018 г. |
00000000 | |
| США-20210108590-А1 | Способ и устройство для запуска и управления импульсными камерами сгорания с использованием селективной форсунки | В ожидании | 17 апреля 2018 г. | Ф23Р7/00 |
Чтобы просмотреть полную историю патентов Wave Engine, запросите доступ »
Группа руководителей Wave Engine (4)
| Имя | Название | Сиденье за столом | Контактная информация |
|---|---|---|---|
| Дааниш Макбул, доктор философии | Главный исполнительный директор и член правления | ||
| Берт Вандерхайден, доктор философии | Главный операционный директор и член правления | ||
| Гэри Замероски | Директор по стратегии и вице-президент по развитию бизнеса |
Вы просматриваете 3 из 4 членов исполнительной команды. Получить полный список »
Получить полный список »
Члены правления Wave Engine (6)
| Имя | Представляющий | Роль | С |
|---|---|---|---|
| Берт Вандерхайден, доктор философии | Волновой двигатель | Главный операционный директор и член правления | 000 0000 |
| Дааниш Макбул, доктор философии | Волновой двигатель | Главный исполнительный директор и член правления | 000 0000 |
| Эйлин О’Рурк | Фонд Абелла | Член правления | 000 0000 |
| Майкл Колфилд | Сам | Член правления | 000 0000 |
| Патрик Дагган | Сам | Член правления | 000 0000 |
Вы просматриваете 5 из 6 членов правления.
Добавить комментарий