12.5 Принципиальная схема каскадного регулирования давления пара с главным корректирующим регулятором. Принципиальная схема регулирования3. Принципиальная схема системы регулированияПринципиальные схемы определяют полный состав приборов, аппаратов и устройств (а также связей между ними), действие которых обеспечивает решение задач управления, регулирования, защиты, измерения и сигнализации. Принципиальные схемы служат основанием для разработки других документов проекта: монтажных таблиц щитов и пультов, схем внешних соединений и др. В зависимости от сложности проектируемого объекта различные цепи могут изображаться совмещённо на одном чертеже или нескольких либо для каждой из цепей разрабатываются отдельные схемы, например принципиальные электрические схемы управления, сигнализации и т. п. На принципиальных электрических схемах при необходимости могут показываться элементы схем другого вида, например элементы пневматических, гидравлических или кинематических схем, а также элементы, не входящие в данную установку, но необходимые для разъяснения принципа её работы. Графические обозначения таких элементов и устройств отделяют на схеме штрих пунктирными линиями, равным по толщине линиям связи, и помещают надписи, указывая в них местонахождение этих элементов, а также необходимые надписи. Схемы, как правило, выполняют для систем (объектов), находящихся в отключенном состоянии. Однако в случаях, когда возникает необходимость, допускается изображать отдельные элементы схем в каком – либо выбранном рабочем положении, оговаривая это на поле чертежа. При разработке систем автоматизации технологических процессов принципиальные электрические схемы обычно выполняют применительно к отдельным самостоятельным элементам, установкам или участкам автоматизируемой системы. Используя эти схемы, составляют в случае необходимости принципиальные электрические схемы, охватывающие целый комплекс отдельных элементов, установок или агрегатов, которые дают полное представление в связях между всеми элементами управления, блокировки, защиты и сигнализации этих установок или агрегатов. Во всех случаях помимо полного удовлетворения требований, предъявляемых к системе управления, каждая схема должна обеспечивать высокую надёжность, простоту и экономичность, четкость действий при аварийных режимах, удобство оперативной работы, эксплуатации, четкость оформления. Принципиальные схемы выполняются без соблюдения масштаба; действительное пространственное расположение составных частей системы автоматизации, как правило, не учитываются или, при необходимости, учитываются приближённо. Графическое обозначение элементов и соединяющие их линии связи необходимо стремиться располагать на схеме таким образом, чтобы обеспечить наилучшее представление о взаимодействии ее составных частей. В соответствии с приведёнными рекомендациями разработана принципиальная схема соединений узлов системы автоматизации подачи пара на лабиринтовые уплотнения турбин (рис. 3).
Рис. 3 – Принципиальная схема соединений узлов системы автоматизации подачи пара на лабиринтовые уплотнения турбин 4. Выбор технических средств автоматизацииПредметом автоматизации является контур подачи пара. Решаться данная задача будет путем установки регулятора давления «до себя» на подающий паропровод. Выберем регулятор давления «до себя» AFA/VFG2 (VFG 21) производства фирмы Danfoss. AFA/VFG2 (VFG 21) – автоматический регулятор, поддерживающий постоянное давление в трубопроводе до регулятора (по ходу движения теплоносителя). При повышении давления до регулятора клапан открывается. Регулятор состоит из регулирующего фланцевого клапана, регулирующего блока с диафрагмой и пружиной для настройки давления. Основные характеристики: • условный проход: Ду = 15–250 мм; • условное давление: Ру = 16, 25, 40 бар; • регулируемая среда: вода; • макс. температура регулируемой среды: 200 °С. Устройство и принцип действия. Если система находится в нерабочем состоянии, то клапан полностью закрыт. Давление в трубопроводе перед регулирующим клапаном передается в полость над регулирующей диафрагмой через импульсную трубку. На другую сторону диафрагмы действует атмосферное давление. При возрастании регулируемого давления свыше установленного значения клапан начинает открываться до тех пор, пока не установится равновесие между усилиями со стороны диафрагмы и пружины. Давление может быть от регулировано изменением настройки. Регуляторы Ду = 15–80 мм с температурой перемещааемой среды до 120 °C могут быть установлены в любом положении. Регуляторы с клапанами Ду = 100–125 мм или с клапанами любого диаметра при температуре перемещаемой среды свыше 120 °C должны быть установлены на горизонтальных трубопроводах регулирующим блоком вниз. Регулятор давления настраивается с по мощью изменения сжатия настроечной пружины. Составные части регулятора давления «до себя» AFA/VFG2 (VFG 21) приведены на рис. 4 [4, С. 6].
Рис. 4 – Составные части регулятора давления «до себя» AFA/VFG2 (VFG 21) 1 – Корпус клапана; 2 – Седло клапана; 3 – Шток клапана; 4 – Крышка клапана; 5 – Заливочный клапан; 6 – Кожух регулирующего блока; 7 – Гофрированная мембрана; 8 – Настроечная пружина; 9 – Гайка настройки давления Пуск регулятора давления "до себя". Перед пуском запорный кран на импульсной линии должен быть открыт. При закрытом кране регулятор работать не будет (останется закрытым). Стабилизирующий дроссель должен быть открыт на 2…3 оборота. Произвести заполнение трубопроводов и внутренних полостей клапана регулятора рабочей средой до рабочего давления. Контроль давления производить по установленным манометрам. Настройка регулятора давления "до себя" Установить пружину (или пружины) с необходимым диапазоном настройки до подачи давления в импульсную линию. Перед снятием установленных пружин полностью их распустить регулировочным винтом. Предохранить колонки от приложения силы перпендикулярно оси колонок. Наблюдая показания манометров, установить требуемую величину давления перед регулятором путем регулировки усилия пружины регулировочным винтом. Не допускается сжимать пружины до соприкосновения витков. Зазор между витками должен оставаться не менее 1,5 мм. В случае, если давление в трубопроводе (в импульсной линии регулятора) колеблется, убрать колебания стабилизирующим дросселем, прикрывая его с целью уменьшения потока по импульсной трубке. Если колебаний давления не наблюдается, в целях предупреждения их возникновения стабилизирующий дроссель (игольчатый вентиль) следует установить в следующее положение: закрыть полностью, затем открыть примерно на 1/3-1/2 оборота. Не допускается эксплуатация регулятора с полностью закрытым стабилизирующим дросселем. Отключение регулятора давления "до себя" Закрыть запорный кран на импульсной линии «+». Сбросить давление на импульсной линии «+». studfiles.net ПРИНЦИПИАЛЬНЫЕ СХЕМЫ РЕГУЛИРОВАНИЯ УРОВНЯ — МегаЛекцииДля регулирования уровня в барабанах паровых котлов применяются регуляторы прямого и косвенного действия, построенные по разным принципиальным схемам. Однако основная масса современных энергетических котлов среднего и высокого давления на районных электростанциях автоматизирована с помощью стандартных электронных авторегуляторов производства МЗТА, РПИБ, РПИК и др. На практике получили распространение авторегуляторы уровня, имеющие следующие основные схемы: а) Пропорциональные регуляторы прямого и косвенного действия, осуществляющие закон П-регулирования и получающие только одно регулирующее воздействие — по уровню в барабане — «одноимпульсные» регуляторы. Они работают с неравномерностью, поэтому поддерживают уровень в зависимости от нагрузки: при повышении нагрузки уровень По устаревшей терминологии, оставшейся только применительно к регуляторам уровня, регуляторы разделяются в зависимости от числа сигналов («импульсов»), подводимых от чувствительных элементов к регулирующему прибору, на «одноимпульсные», «двухимпульсные» и «трехимпульсные». Соответственно с установиншнмся в настоящее время понятием под «импульсом» подразумевается кратковременное единичное воздействие на регулятор. В связи с распространением регуляторов, действующих последовательными толчками— импульсных регуляторов, рассматриваемый термин приобрел другое значение.
понижается, а при уменьшении нагрузки повышается. Свойство пропорциональности у регуляторов косвенного действия достигается вводом жесткой обратной связи, которая обычно выполняется по положению регулирующего органа и более редко — по расходу питательной воды. б) Комбинированные регуляторы, действующие по отклонению регулируемого параметра — уровня и по возмущению, возникающему при изменении паровой нагрузки котла (двухимпульсные регуляторы). в) Комбинированные регуляторы, действующие при отклонении уровня и паровой нагрузки, с жесткой обратной связью по расходу питательной воды (трехимпульсные регуляторы). В случае применения электронных регуляторов системы ВТИ (типа РПИК, РПИБ .и др.) в схеме используется устройство упругой обратной связи регулирующего прибора. Применение упругой обратной связи в схем регулятора уровня улучшает динамические качества процесса регулирования. Подавляющее количество котлов на электростанциях снабжено регуляторами питания, выполненными по этой схеме. г) Изодромные регуляторы, получающие командный сигнал по отклонению уровня и снабженные устройством упругой обратной связи. В установившихся состояниях изодромные регуляторы поддерживают одинаковый уровень, независимо от нагрузки котла, но качество регулирования при их применении уступает качеству, обеспечиваемому «трехимпульсными» регуляторами. В частности, применение регулятора, выполненного по такой схеме, приводит к значительным по величине колебаниям расхода питательной воды. В связи с этим «одноимпульсные» изодромные регуляторы уровня широкого применения не нашли. д) Существует также схема с последовательной установкой двух регуляторов: пропорционального регулятора уровня и регулятора, поддерживающего постоянную разность давлений по обе стороны клапана регулятора уровня, называемого обычно дифференциальным регулятором давления. При такой схеме дифрегулятор ликвидирует внутренние возмущения, возникающие на регуляторе уровня при колебаниях давления воды в питательных линиях. Однако из-за сложности и пониженной надежности эта схема редко применяется на практике.
Пропорциональные регуляторы уровня находят применение для автоматизации котлов низкого и среднего давления небольшой мощности. На современных мощных котлах высокого давления эти регуляторы не применяются из-за неблагоприятных динамических характеристик объекта регулирования: величина неравномерности, необходимой для устойчивой работы системы на этих котлах, обычно превышает диапазон колебаний уровня, допустимый по условиям эксплуатации котла. Принципиальная схема и статическая характеристика регулирования при пропорциональном регуляторе показаны на рис. 1-2. В качестве примера на рис. 1-3 изображена конструктивная схема термостатного регулятора уровня прямого действия, работающего по закону П-регулирования. К достоинствам термостатных регуляторов относятся большая простота и высокая надежность действия, а к недостаткам — начительное время запаздывания чувствительного элемента (термостата) при отклонении уровня и небольшая величина развивающего им усилия. Основная часть термостата выполнена в виде стальной или латунной трубки /, концы которой заделаны в колена 2 а 3 со штуцерами для присоединения трубопроводов 4 и 5. Термостат смонтирован в раме из швеллеров, устанавливаемой около котла, на уровне верхнего барабана. Трубопроводы 4 и 5 соединяют чувствительную трубку с паровым и водяным пространствами барабана. Чувствительная трубка установлена наклонно с таким расчетом, чтобы при высшем уровне в барабане она заполнялась водой, а при низшем — паром. При работе котла в чувствительной трубке всегда имеется уровень, выше которого находится пар, а ниже — вода. Положение уровня в барабане и в термостате изменяется одновременно. Действие термостата основано па удлинении металла при повышении температуры. Верхняя часть трубки нагревается до температуры, близкой к температуре насыщения пара. Нижняя часть трубки заполнена водой, температура которой из-за охлаждающего действия окружающего воздуха ниже температуры пара. При понижении уровня длина прогретого паром участка чувствительной трубки увеличивается за счет сокращения охлаждаемого водой нижнего участка. В результате средняя температура металла чувствительной трубки повышается и длина ее увеличивается за счет термического удлинения. Величина удлинения трубки зависит от коэффициента термического удлинения металла. Например, для стали этот коэффициент равен 1,2 мм/м на 100° С, а для латуни он равен примерно 2,5 мм/м па 100° С. При перемещении уровня по всей длине чувствительной трубки от высшего до низшего предела длина стального термостата увеличивается примерно на 2 мм. Рис. 1-3. Схема термостатного пропорционального авторегулятора уровня. а — при работающем авторегуляторе уровня; megalektsii.ru Принципиальные схемы автоматического регулирования - Справочник химика 21
Рнс. 83. Принципиальная схема автоматического регулирования процесса хлорирования с коррекцией расхода по величине остаточного хлора в воде [c.206] На рис. 158 представлена принципиальная схема автоматического регулирования и контроля теплового режима мазутной методической печи с одной зоной нагрева. [c.311]
Принципиальные схемы автоматического регулирования [c.262] Рнс. 185. Принципиальная схема автоматического регулирования станции дистилляции [c.474] Рнс. 297. Принципиальная схема автоматического регулирования работы кислородного турбокомпрессора [c.697]
Процесс выращивания кристаллов можно автоматизировать единственным способом, используя приборы с радиоизотопными датчиками, реагирующими на разницу в плотностях жидкой и твердой фаз кристаллизующегося вещества. На рис. 145 показана принципиальная схема автоматического регулирования процесса выращивания кристаллов. Пучок радиоизотопного излучения от излучателя 3, пройдя через границу раздела твердой и жидкой фаз кристаллизующегося вещества, падает на детектор излучения 4. Сигнал, возникающий на выходе детектора, усиливается прибором 5 и попадает в преобразователь 6, где непрерывно сравнивается с сигналом, поступающим от эталонного устройства. Это устройство состоит из компенсационного источника излучения 12, эталонного поглотителя 11, выполненного в виде клина, и детектора излучения 13. Нулевое положение преобразователя устанавливают в начале процесса регулирования при помоши рукоятки клина 10. Скорость кристаллизации задают скоростью перемещения источника и связанного с ним детектора излучения. [c.272] Принципиальные схемы автоматического регулирования холодильных установок приводятся на рнс. 1Х.25 и 1Х.26. Сравни- [c.236]
Основными регулируемыми параметрами ГФУ являются температура и давление в ректификационных колоннах, расход и температура потоков орошения, абсорбента, теплоносителя и хладоагента, уровни жидкостей в аппаратах и др. Принципиальные схемы автоматического регулирования основных параметров ГФУ были освещены ранее, в гл. V. В настоящем разделе будут рассмотрены приборы для измерения технологических параметров. [c.150]
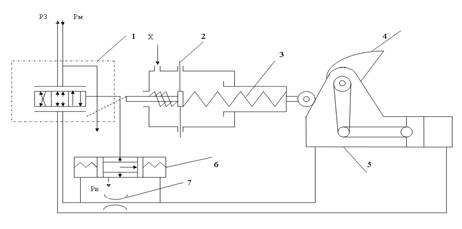
Рлс. 4-21, Принципиальная схема автоматического регулирования котла, сжигающего газ и мазут. [c.230] На рис. 13.29 показана принципиальная схема автоматического регулирования процесса получения сырого аргона на установке аысокого давления КжАр-1,6 (КЖ-1Ар). Автоматически регулируются содержание кисЛорода в аргонной фракции с коррекцией по содержанию аргона в сыром аргоне, расход сырого аргона с коррекцией по содержанию кислорода на контрольной (52-й) тарелке и давление в верхней колонне. [c.685] В качестве импульсного механизма, воспринимающего изменение телшературы в этих схемах, чаще всего пспо.лъзуется биметаллическая пластинка. На рпс. 146 приведена принципиальная схема автоматического регулирования температуры, работающая по принципу включено — выключено . Автомат состоит из задатчика режпма 1, биметаллической пластинки 2 с контактами 3, трансформатора 4 и соленоидного клапана 5. [c.255] Локальные системы автоматического регулирования параметров, использованные при автоматизации абсорбционных установок, состоят из отдельных замкнутых контуров, каждый из которых включает в себя четыре звена датчик (измеритель параметра), регулятор, исполнительный механизм и регулирующий орган. Регулятор имеет три режима работы — ручное управление, переходной режим и режим автоматического регулирования. При режиме ручного управления с панели дистанционного управления, находящейся в регуляторе, изменяют положение регулирующего органа пневматического клапана и таким образом достигают заданной величины регулируемого параметра. При режиме автоматического регулирования устанавливают на регуляторе заданное значение параметра и переводят его на работу в автоматическом режиме. При этом сигнал технологического параметра от датчика поступает в регулятор, где сравнивается с сигналом задания. Сигнал рассогласования между ними по закону регулирования передается на исполнительный механизм (регулирующие пневмоклапаны). При необходимости изменения величины параметра вручную или по сигналу от управляющей ЭВМ соответственно меняется задание на автоматическом регуляторе. Для абсорбционных установок выбрана единая принципиальная схема автоматического регулирования параметров, т. е. выбран один тип автоматических пневморегуляторов и исполнительных механизмов — пневмоклапанов. Различны лишь датчики-измерители. Причем если от датчика поступает информация в виде электрического сигнала, то его преобразуют в пневматический при помощи электропневмопреобразователей. [c.220]chem21.info 12.5 Принципиальная схема каскадного регулирования давления пара с главным корректирующим регулятором.1 – главный (корректирующий) регулятор, 2 – регулятор тепловой нагрузки, 3 – дифференцирующее устройство, Зд – задатчик. При внутренних возмущениях, например, при уменьшении подачи топлива на один из котлов и снижении его паропроизводительности регулятор тепловой нагрузки (2) этого котла увеличит подачу топлива только в свой котел и восстановит его нагрузку вновь до значения, заданного корректирующим регулятором давления. При внутренних возмущениях тепловая нагрузка меняется быстрее, чем давление пара. Поэтому регулятор тепловой нагрузки (2) воспримет нарушения и восстановит подачу топлива прежде, чем это нарушение успеет существенно сказаться на давлении пара в общей паровой магистрали. Таким образом, внутреннее возмущение на одном из котлов будет устранено при данной схеме регулирования до того, как оно успеет оказать значительное влияние на режимы остальных, параллельно работающих котлов. Эта схема позволяет перевести часть котлов в базовый режим работы. При этом регулятор тепловой нагрузки останется в работе, но для него задатчиком устанавливается постоянное задание, не зависящее от работы главного (корректирующего) регулятора давления. В этом случае постоянство нагрузки этого котла автоматически поддерживается его регулятором тепловой нагрузки. 12.6 Регулирование питания барабанного котельного агрегата водой.Автоматизация питания барабанных котлоагрегатов предусматривает автоматическое управление питанием водой как при условиях нормального протекания эксплутационных режимов работы котла, так и при режимах пуска и останова котельного агрегата. В свою очередь нормальные эксплутационные режимы работы могут протекать при постоянном и переменном (скользящем) давлении свежего пара. Показателем соответствия материального баланса между паром и водой – расхода свежего пара и расхода питательной воды служит уровень в барабане котла. Отклонение уровня воды в барабане от среднего значения характеризует наличие небаланса между притоком питательной воды и расходом пара. Оно (отклонение) происходит также вследствие изменения паросодержания пара в пароводяной смеси подъемных труб за счет колебаний давления пара в барабане котла или изменений тепловосприятия испарительных поверхностей нагрева. Так, при увеличении расхода пара в первый момент после возмущения уровень воды в барабане возрастает в результате резкого уменьшения давления пара, что в свою очередь приводит к увеличению паросодержания в подъемных трубах циркуляционного контура и росту уровня. Это явление называется набуханием уровня. При изменении нагрузки котла и, как следствие, изменении его паропроизводительности средний уровень воды должен поддерживаться постоянным. Максимально допустимые отклонения уровня воды в барабане составляют +100 мм от среднего значения, установленного заводом-изготовителем. При этом средний уровень не обязательно должен совпадать с геометрической осью барабана. Снижение уровня ниже видимой части водомерного стекла, установленного на барабане котельного агрегата, считается «упуском» воды, а превышение его верхней видимой части – «перепиткой». Расстояние между этими критическими отметками составляет 400 мм. Снижение уровня ниже места присоединения опускных труб циркуляционного контура может привести к нарушению питания и охлаждению водой подъемных труб, нарушению их прочности в местах стыковки с корпусом барабана, а в наиболее тяжелых случаях и пережогу. Чрезмерное повышение уровня может привести к ухудшению действия внутрибарабанных сепарационных устройств, заносу солями пароперегревателя, а также забросу частиц воды в турбину, что может явиться причиной тяжелых механических повреждений лопаток ее ротора. Снабжение барабана водой осуществляется по одной, реже двум ниткам трубопроводов питательной воды, одна из которых служит резервной. Схема автоматического регулирования питания котельного агрегата.В АСР питания котла водой реализован принцип комбинированного регулирования по возмущению – при изменении расхода пара или питательной воды и отклонению – при изменении уровня воды в барабане котла. Регулятор питания должен обеспечить постоянство среднего уровня воды независимо от нагрузки котла и возмущающих воздействий (Рис. 12.7). В АСР питания используют для этих целей трехимпульсный регулятор питания. Сигналы по возмущению: расход свежего пара Dn, расход питательной водыDnв. Сигнал по отклонению: уровень в барабане котельного агрегатаHб. Сигнал по расходу питательной воды используется как выключающий для снятия в статике сигнала по расходу пара. Регулятор питания перемещает регулировочный орган на линии питательной воды при появлении сигнала небаланса между расходами питательной воды и перегретого пара. Помимо этого он воздействует на положение клапана при отклонении уровня воды в барабане котельного агрегата от заданного значения. Использование сигналов DnиDnвобеспечивают быстродействие АСР питания, сигналHб– заданную точность поддержания уровня в барабане. В схеме измерительного блока регулятора питания датчики Dn,DпвиHбвключены таким образом, что при понижении уровня воды в барабане котлоагрегата, увеличении расхода пара, уменьшении расхода питательной воды, они действуют в одном направлении – в сторону открытия питательного клапана, а при повышении уровня, уменьшении расхода пара и увеличении расхода питательной воды в сторону закрытия питательного клапана.
Рис. 12.7 Принципиальная схема регулирования питания барабана котла. 1-экономайзер, 2-барабан котла, 3-пароперегреватель, 4-регулятор питания, 5-датчик уровня, 6-задатчик, 7-датчик расхода пара, 8-датчик расхода питательной воды, 9-регулятор производительности, 10-питательный клапан, 11-питательный насос, 12-гидромуфта, 13-электродвигатель, 14 – дифференциальный манометр. В качестве регулировочных органов питания используются шиберные клапаны и клапаны золотникового типа. При полном сбросе нагрузки на котле вследствие повышения давления пара в барабане возможно срабатывание предохранительных клапанов. Количество пара, проходящее через эти клапаны не учитывается датчиком расхода пара.Регулятор питания при этом становится двухимпульсным и будет поддерживать заниженный уровень в барабане в соответствии с неравномерностью регулятора по уровню. Поэтому необходимо выбирать минимально возможную величину неравномерности по уровню, обеспечивающую приемлемые динамические качества АСР питания. При скользящем (переменном) начальном давлении пара перед турбиной для котла, работающего с ней в блоке, по всему пароводяному тракту отсутствуют дросселирование рабочего тела, а уменьшение давления производится снижением скорости вращения питательного насоса, при этом сокращается мощность, затрачиваемая на его привод. Изменение числа оборотов питательного насоса, (11) связанного гидромуфтой (12) с электродвигателем (13), достигается воздействием регулятора производительности (9) по сигналу перепада давления на питательном клапане (10) от дифманометра (14). studfiles.net Принципиальная схема регулирования частоты вращения турбины — КиберПедия
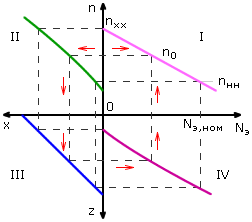
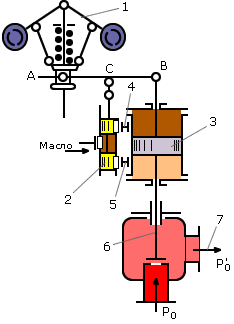
Схема регулирования частоты вращения турбины показана на рис. 20.3, в которой основными элементами являются: 1- регулятор скорости; 2 - отсечной золотник; 3 - сервомотор; 4, 5 - напорная и сливная линии системы; 6 - регулирующий клапан турбины. С ростом частоты вращения ротора турбины под действием центробежных сил грузы регулятора скорости перемещают его муфту (сжимая пружину в ней), в результате чего рычаг АВ поворачивается вокруг точки В. Тогда отсечной золотник 2 смещается вверх и соединяет верхнюю полость сервомотора 3 с напорной линией 4, а нижнюю - со сливной линией 5. Поршень сервомотора перемещается вниз и через передаточные механизмы формируется усилие на закрытие регулирующего клапана 6. В итоге расход водяного пара в турбину сокращается и уменьшается крутящий момент на валу турбины, что приводит к смещению моментной характеристики MТ в положение, обеспечивающее исходное значение частоты вращения ротора. Одновременно с помощью обратной связи (правый конец рычага АВ связан со штоком сервомотора) отсечной золотник возвращается в исходное среднее положение, что стабилизирует переходный процесс и обеспечивает устойчивость регулирования. При снижении частоты вращения процесс регулирования протекает аналогично, но этот процесс связан с ростом расхода водяного пара в турбину. Рис. 20.3. Принципиальная схема САР с однократным усилением 1- регулятор скорости; 2 - отсечной золотник; 3 - сервомотор; 4 - напорная линия системы; 5 – сливная линия; 6 - регулирующий клапан турбины Совокупность установившихся режимов работы турбины и положений органов ее САР представляются развернутой статической характеристикой (рис. 20.4,а). Здесь зависимость перемещения муфты регулятора скорости от частоты вращения x=f(n) в квадранте II представленной диаграммы является статической характеристикой регулятора частоты, характер которой определяется его конструкцией. Зависимость хода поршня сервомотора от перемещения муфты регулятора является прямолинейной (z=f(x) в III квадранте). В IV квадранте дана зависимость электрической мощности от хода сервомотора (NЭ=f(z)). В итоге простых построений в I квадранте получается собственно статическая характеристика регулирования n=f(NЭ), связывающая частоту вращения с мощностью. Из нее следует, что при изменении мощности турбины частота вращения не остается постоянной, например, несколько снижается с ростом мощности. Наклон статической характеристики определяется степенью неравномерности регулирования частоты , (20.2) где nxx - частота вращения при холостом ходе, nнн - то же при номинальной мощности, n0 – то же номинальная (рис. 20.4,а). В соответствии с ГОСТ 24278-89 при номинальных значениях параметров водяного пара в турбине d = 4…5%. При больших значениях степени неравномерности возрастают динамические забросы частоты при сбросах нагрузки, а при меньших значениях d трудно обеспечивается устойчивость регулирования. Статические характеристики САР обычно имеют участки с разной крутизной, а при мощности 0,15NЭном степень неравномерности не регламентируется для повышения устойчивости работы на малых нагрузках, а также для облегчения процесса включения турбоагрегата в сеть. Горизонтальные участки статической характеристики регулирования исключаются из-за потери устойчивости САР. Вместе с тем, в системах автоматического регулирования мощных паровых турбин имеется возможность оперативно изменять степень неравномерности в пределах d=0,02-0,08. а) б) Рис. 20.4. Развернутая (а) и реальная (б) статические характеристики САР турбины
Наличие сил трения в механических элементах системы автоматического регулирования, люфтов в ее передаточных механизмах и других приводит к нечувствительности регулирования (рис. 20.4,б), которая характеризуется степенью нечувствительности по частоте вращения: en=Dn/n0. Этой величиной определяется совершенство САР. В соответствии с ГОСТ 13109-87 для паровых турбин мощностью свыше 150 МВт с гидравлическими системами регулирования степень нечувствительности en<0,1% должна быть, а в электрогидравлической системе с регулятором мощности - en<0,06%. Один из путей совершенствования САР – отказ от механических связей в системе регулирования и замена их гидравлическими или электрическими. Частота электрического тока в энергосистеме в соответствии с ПТЭ (Правилами технической эксплуатации энергетического оборудования) должна поддерживаться на уровне 50±0,1 Гц. Временно допускается отклонение частоты не более ±0,2 Гц. В то же время степени неравномерности d=4…5% соответствует изменение частоты 2…2,5 Гц, т.е. на порядок больше допустимого уровня. Кроме того, приходится изменять частоту вращения ротора турбины в процессах включения турбогенератора в сеть (при синхронизации электрогенератора) и при испытаниях автоматов безопасности турбины. Поэтому в САР должен быть механизм для изменения частоты вращения при работе турбины в энергосистеме, когда частота в ней поддерживается всеми параллельно работающими турбоагрегатами. Этот механизм называют МУТ – механизмом управления турбиной. С его помощью изменяется положение какого-либо звена системы (буксы золотника регулятора частоты вращения) передачи импульса на перемещение от регулятора скорости к регулирующим клапанам. В регуляторе ЛМЗ (рис. 20.1) воздействие ручкой 14 переводит буксу 13 в новое положение, чем изменяется открытие окна 11 и в итоге давление рх. Если турбина работает в изолированной сети, то ее мощность, определяемая положением поршня сервомотора (положением штока регулирующего клапана), практически не изменится, но частота вращения валопровода турбоагрегата станет другой. Если турбина работает в энергосистеме, это же воздействие МУТ приведет к возрастанию мощности турбины при неизменной частоте вращения. В обоих случаях воздействие МУТ приводит к смещению характеристики z=f(x) в III квадранте развернутой статической характеристики САР (рис. 20.4,а), что, в свою очередь, вызывает смещение характеристики n=f(NЭ) в I квадранте. Механизм управления турбиной используется в процессе синхронизации электрического генератора при включении турбоагрегата в энергосистему для его параллельной работы с другими турбоустановками.
cyberpedia.su Принципиальная схема регулирования частоты вращения турбины
Схема регулирования частоты вращения турбины показана на рис. 20.3, в которой основными элементами являются: 1- регулятор скорости; 2 - отсечной золотник; 3 - сервомотор; 4, 5 - напорная и сливная линии системы; 6 - регулирующий клапан турбины. С ростом частоты вращения ротора турбины под действием центробежных сил грузы регулятора скорости перемещают его муфту (сжимая пружину в ней), в результате чего рычаг АВ поворачивается вокруг точки В. Тогда отсечной золотник 2 смещается вверх и соединяет верхнюю полость сервомотора 3 с напорной линией 4, а нижнюю - со сливной линией 5. Поршень сервомотора перемещается вниз и через передаточные механизмы формируется усилие на закрытие регулирующего клапана 6. В итоге расход водяного пара в турбину сокращается и уменьшается крутящий момент на валу турбины, что приводит к смещению моментной характеристики MТ в положение, обеспечивающее исходное значение частоты вращения ротора. Одновременно с помощью обратной связи (правый конец рычага АВ связан со штоком сервомотора) отсечной золотник возвращается в исходное среднее положение, что стабилизирует переходный процесс и обеспечивает устойчивость регулирования. При снижении частоты вращения процесс регулирования протекает аналогично, но этот процесс связан с ростом расхода водяного пара в турбину.
Рис. 20.3. Принципиальная схема САР с однократным усилением 1- регулятор скорости; 2 - отсечной золотник; 3 - сервомотор; 4 - напорная линия системы; 5 – сливная линия; 6 - регулирующий клапан турбины Совокупность установившихся режимов работы турбины и положений органов ее САР представляются развернутой статической характеристикой (рис. 20.4,а). Здесь зависимость перемещения муфты регулятора скорости от частоты вращения x=f(n) в квадранте II представленной диаграммы является статической характеристикой регулятора частоты, характер которой определяется его конструкцией. Зависимость хода поршня сервомотора от перемещения муфты регулятора является прямолинейной (z=f(x) в III квадранте). В IV квадранте дана зависимость электрической мощности от хода сервомотора (NЭ=f(z)). В итоге простых построений в I квадранте получается собственно статическая характеристика регулирования n=f(NЭ), связывающая частоту вращения с мощностью. Из нее следует, что при изменении мощности турбины частота вращения не остается постоянной, например, несколько снижается с ростом мощности. Наклон статической характеристики определяется степенью неравномерности регулирования частоты
где nxx - частота вращения при холостом ходе, nнн - то же при номинальной мощности, n0 – то же номинальная (рис. 20.4,а). В соответствии с ГОСТ 24278-89 при номинальных значениях параметров водяного пара в турбине d = 4…5%. При больших значениях степени неравномерности возрастают динамические забросы частоты при сбросах нагрузки, а при меньших значениях d трудно обеспечивается устойчивость регулирования. Статические характеристики САР обычно имеют участки с разной крутизной, а при мощности 0,15NЭном степень неравномерности не регламентируется для повышения устойчивости работы на малых нагрузках, а также для облегчения процесса включения турбоагрегата в сеть. Горизонтальные участки статической характеристики регулирования исключаются из-за потери устойчивости САР. Вместе с тем, в системах автоматического регулирования мощных паровых турбин имеется возможность оперативно изменять степень неравномерности в пределах d=0,02-0,08.
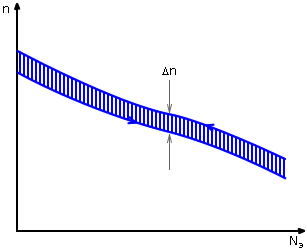
а) б) Рис. 20.4. Развернутая (а) и реальная (б) статические характеристики САР турбины
Наличие сил трения в механических элементах системы автоматического регулирования, люфтов в ее передаточных механизмах и других приводит к нечувствительности регулирования (рис. 20.4,б), которая характеризуется степенью нечувствительности по частоте вращения: en=Dn/n0. Этой величиной определяется совершенство САР. В соответствии с ГОСТ 13109-87 для паровых турбин мощностью свыше 150 МВт с гидравлическими системами регулирования степень нечувствительности en<0,1% должна быть, а в электрогидравлической системе с регулятором мощности - en<0,06%. Один из путей совершенствования САР – отказ от механических связей в системе регулирования и замена их гидравлическими или электрическими. Частота электрического тока в энергосистеме в соответствии с ПТЭ (Правилами технической эксплуатации энергетического оборудования) должна поддерживаться на уровне 50±0,1 Гц. Временно допускается отклонение частоты не более ±0,2 Гц. В то же время степени неравномерности d=4…5% соответствует изменение частоты 2…2,5 Гц, т.е. на порядок больше допустимого уровня. Кроме того, приходится изменять частоту вращения ротора турбины в процессах включения турбогенератора в сеть (при синхронизации электрогенератора) и при испытаниях автоматов безопасности турбины. Поэтому в САР должен быть механизм для изменения частоты вращения при работе турбины в энергосистеме, когда частота в ней поддерживается всеми параллельно работающими турбоагрегатами. Этот механизм называют МУТ – механизмом управления турбиной. С его помощью изменяется положение какого-либо звена системы (буксы золотника регулятора частоты вращения) передачи импульса на перемещение от регулятора скорости к регулирующим клапанам. В регуляторе ЛМЗ (рис. 20.1) воздействие ручкой 14 переводит буксу 13 в новое положение, чем изменяется открытие окна 11 и в итоге давление рх. Если турбина работает в изолированной сети, то ее мощность, определяемая положением поршня сервомотора (положением штока регулирующего клапана), практически не изменится, но частота вращения валопровода турбоагрегата станет другой. Если турбина работает в энергосистеме, это же воздействие МУТ приведет к возрастанию мощности турбины при неизменной частоте вращения. В обоих случаях воздействие МУТ приводит к смещению характеристики z=f(x) в III квадранте развернутой статической характеристики САР (рис. 20.4,а), что, в свою очередь, вызывает смещение характеристики n=f(NЭ) в I квадранте. Механизм управления турбиной используется в процессе синхронизации электрического генератора при включении турбоагрегата в энергосистему для его параллельной работы с другими турбоустановками.
Похожие статьи:poznayka.org Преобразование принципиальной схемы в функциональную. Принципиальная схема системы автоматического регулирования температурыпропускании через нее электрического тока выделяется тепло, и протекающий через подогреватель воздух нагревается. Температура воздуха на выходе из подогревателя Т воспринимается термопарой 3 и изменяется в стандартный электрический сигнал преобразователем 5, который поступает на вход Ремиконта-100. Выходной сигнал Ремиконта управляет подачей электроэнергии на спираль 7 подогревателя 1, что приводит к изменению интенсивности нагрева потока воздуха и изменению его температуры. Для повышения качества регулирования в системе предусмотрен дополнительный контур регулирования. Температура внешней поверхности подогревателя 1 после термопары 4 и преобразователя 6 в виде стандартного сигнала также направляется на вход Ремиконта. Программирование каскадной АСР осуществляется с панели оператора 9. 17 Вариант.
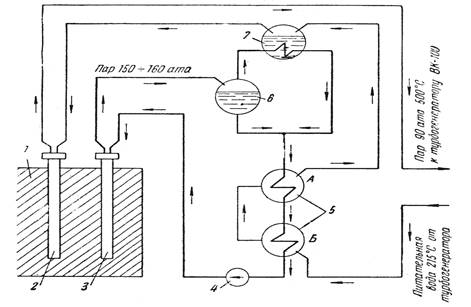
1 – реактор; 2 – пароперегревательный канал; 3 – испарительный канал; 4 – циркуляционный насос первого контура; 5А – подогреватель-испаритель; 5Б – подогреватель-сепаратор; 6 –сепаратор; 7 – испаритель. Рисунок 1 – Принципиальная тепловая схема атомной электрической станции Реактор и турбина включены в общую тепловую схему, имеющую два контура движения теплоносителя. Оба контура в качестве теплоносителя используют воду. В первом контуре принято давление 150—160 ата. Кипение этой воды происходит в испарительных каналах 3 реактора 1, из которых паро-водяная смесь направляется в сепаратор 6, где пар отделяется от воды. Пар из сепаратора 6 поступает в испаритель 7, где за счет тепла его конденсации вырабатывается пар второго контура. Конденсат пара первого контура из испарителя 7 направляется в подогреватель-испаритель 5А. В этот подогреватель поступает и вода первого контура, отделенная из паро-водяной смеси в сепараторе 6. Из подогревателя 5А вода первого контура поступает в подогреватель 5Б, где охлаждается примерно до 300° С и далее насосом 4 подается в испарительные каналы 3 и цикл первого контура повторяется. Вторичный пар, полученный в испарителе 7, направляется к реактору в перегревательные каналы 2, после которых поступает в нормальную турбину ВК-100 при давлении 90 ата и температуре перегрева 500° С. После нагревания питательной воды в регенеративных подогревателях турбины ВК-100 до 215°С она направляется в подогреватель 5Б, в котором приобретает температуру насыщения при давлении 110 ата и переходит в подогреватель-испаритель 5А. В подогревателе-испарителе вода частично испаряется до весового паросодержания около 20%. Из подогревателя 5А паро-водяная смесь второго контура направляется в испаритель 7, где и испаряется полностью, после чего цикл повторяется. 18 Вариант
1- электронный усилитель; 2- вентиль; 3- реверсивный электродвигатель; 4- резистор; 5- переменный резистор; 6- бак; 7- поплавок Рисунок 1 - Автоматическая система регулирования уровня жидкости в баке Рассмотрим автоматическую систему регулирования уровня жидкости в баке. Если приток Gп равен расходу Gр, регулируемая величина жидкости в баке 6 объекта регулирования находится на постоянном заданном значении жидкости. При нарушения равновесия Gп=Gр уровня изменяется, что приводит к рассогласованию между текущим и заданным значениями уровня жидкости. Регламентный режим работы нарушен. При отклонения уровня поплавок 7 перемещает скользящий контакт переменного резистора 5, который совместно с резистором 4 составляет мостовую схему. Сигнал разбаланса моста ∆U в дальнейшем усиливается электронным усилителем 1 , на выходе которого включен реверсивный электродвигатель 3. Вал электродвигателя связан с расположенным на линии подачи вентилем 2, который является элементом цепи, регулирующим органом, в то время как электродвигатель можно рассматривать как исполнительный механизм. Направление вращения вала электродвигателя и, следовательно, открытие и закрытие вентиля 2 зависит от направления изменения уровня. При увеличения уровня вентиль 2 уменьшит подачу жидкости, при уменьшения уровня подача увеличивается. Заданное значение уровня жидкости можно менять, перемещая скользящий контакт резистора 4,что приводит к разбалансу мостовой схемы, а в дальнейшем – к изменению подачи, а значит, и уровня жидкости. 19 Вариант.
1-двухкаскаднуй дросселирующий распределитель;2-сравнивающий vunivere.ru |
|
||||||||||||||||||
|
|
||||||||||||||||||
|

 , (20.2)
, (20.2)