Содержание
Эффективный источник питания асинхронного двигателя
Эффективный источник питания асинхронного двигателя
Данное устройство предназначено для питания трехфазных асинхронных двигателей, серийно выпускаемых промышленностью от источника низкого напряжения 12V или от осветительной сети ~220V. В отличии от всех подобных устройств, схема исполузует рекурперацию энергии обратной ЭДС обмоток двигателя что позволяет в несколько раз снизить ток потребления двигателем, особенно на холостом ходу. Например, двигатель 0.6 кВт 1350 Об/мин на холостом ходу при номинальной частоте вращения потребляет всего 4.5А от источника 12V или около 300 мА от сети ~220V. Такого потребления невозможно добиться при всех существующих способах запитки подобных двигателей. Устройство формирует полноценные 3 фазы для обеспечения нормального вращения двигателя, что позволяет плавно регулировать частоту вращения двигателя в широких пределах. При питании устройства от сети с использованием умножителя напряжения (на каждую фазу двигателя подается в этом случае 400V) мощность двигателя становится близкой к номинальной. При дальнейшем увеличении напряжения питания мощность увеличится пропорционально (при этом, естественно, увеличится потребляемый ток). Фактически, предельная мощность двигателя зависит от параметров силовых элементов схемы (тиристоров и фазных конденсаторов), а таккже, от диэлектрической прочности изоляции обмоток двигателя, от способности обмотки выдерживать мощные импульсы тока, от механической прочности корпуса двигателя. При усовершенствовании схемы (замене деталей в силовой цепи на более высоковольтные) с двигателя можно снять мощности больше в несколько раз, чем позволяют его паспортные характеристики. Мощность можно увеличивать до тех пор, пока не расплавится обмотка в точках соединения или не разнесет корпус двигателя. Как уже отмечалось, при этом, естественно, вырастет ток потребления. Также замечу, что устройство не является «вечным двигателем» — при существущем дизайне асинхронного двигателя снять с него «лишнее» не получится. Однако, применение данной схемы позволяет легко повысить КПД двигателя от 0.
 6 до 0.9, что может быть важно для энергосберегающих проектов (примечаение: КПД маломощного до 3 Квт асинхронного двигателя не может быть больше 70%, более мощные двигатели с большим количеством полюсов имеют КПД около 90%).
6 до 0.9, что может быть важно для энергосберегающих проектов (примечаение: КПД маломощного до 3 Квт асинхронного двигателя не может быть больше 70%, более мощные двигатели с большим количеством полюсов имеют КПД около 90%).
Характерной особенностью схемы является полное отсутствие нагрева двигателя и элементов схемы. Обмотки двигателя запитыватся короткими и мощными высокоамперными импульсами, через обмотки не протекает постоянный ток. Это не позволяет обмоткам стать активной нагрузкой, что исключает их нагрев. Также, двигатель не грееется (соответственно, не перегорает) в случае заклинивания ротора. В некотром роде, двигатель их асинхронного превращается в синхронный. Если судить по потребляемому току, получается, что при нагрузке вала, начинает пропорционально расти ток, однако когда нагрузка стеновится критической, энергия МП не в состоянии преодолеть силы торможения ротора, обороты двигателя резко падают, вал останавливается. При этом, также, падает ток. Стоит отпустить ротор, он начинает раскручиваться и постепенно входит в режим синхронизации. После входа в этот режим можно снимать нагрузку с вала.
После входа в этот режим можно снимать нагрузку с вала.
Главный недостаток схемы состоит в низком пусковом моменте двигателя. При напряжении питания 200V на каждую фазу и начальной частоте 25 Гц пуск и синхронизация наступает за 3 — 5 сек (при используемом двигателе), дальше, можно резко увеличить частоту до номинальной, при этом двигатель фактически мгновенно отрабатывает команду.
К преимуществам такой схемы запитки двигателя можно отнести низкий уровень шума при работающем двигателе, полное отсутствие характерного «гудения», вибрации и т.д. Ротор вращается очень мягко, что позволяет услышать механические деффекты двигателя. Например выяснилось, что в используемом двигателе оказался разбит передный подшипник — раньше, при нормальном включении за гулом и вибрацией этого не было слышно. Что касается современных т.н. «частотных преобразователей» используемых в металообрататывающих станках, последние, например, питают двигатель прямоугольными импульсами, что создает очень мощный шум — как будто работает не двигатель а сварочный трансформатор. При этом, двигатель, по прежнему остается асинхронным т.е. в нем присутствует эффект «проскальзывания» МП, что может приводить к плаванию оборотов под разной нагрузкой. Данная схема лишена подобного недостатка (см. выше), что делает ее привлекательной для подобных приложений.
При этом, двигатель, по прежнему остается асинхронным т.е. в нем присутствует эффект «проскальзывания» МП, что может приводить к плаванию оборотов под разной нагрузкой. Данная схема лишена подобного недостатка (см. выше), что делает ее привлекательной для подобных приложений.
Используемые в схеме детали доступны, практически, каждому радиолюбителю, что позволяет легко повторить или улучшить схему. Требуются дальнейшие иссследования данного способа включения двигателей, поэтому материал представляется в открытом виде. При повторении схемы, просьба сообщить об этом автору с целью обмена опытом.
Описание схемы
Для начала следует вспомнить, как надо правильно питать подобные двигатели. В учебниках пишут, что асинхронные двигатели следует запитывать только синусодальным трехфазным переменным током частотой 50Гц. Однако это не совсем так. Питание двигателя допускается любой формой сигналов в т.ч. прямоугольными импульсами. Существующие частотные преобразователи ШИМ позволяют не только регулировать частоту вращения ротора (она зависит только от частоты) но и мощность — она регулируется шириной импульса.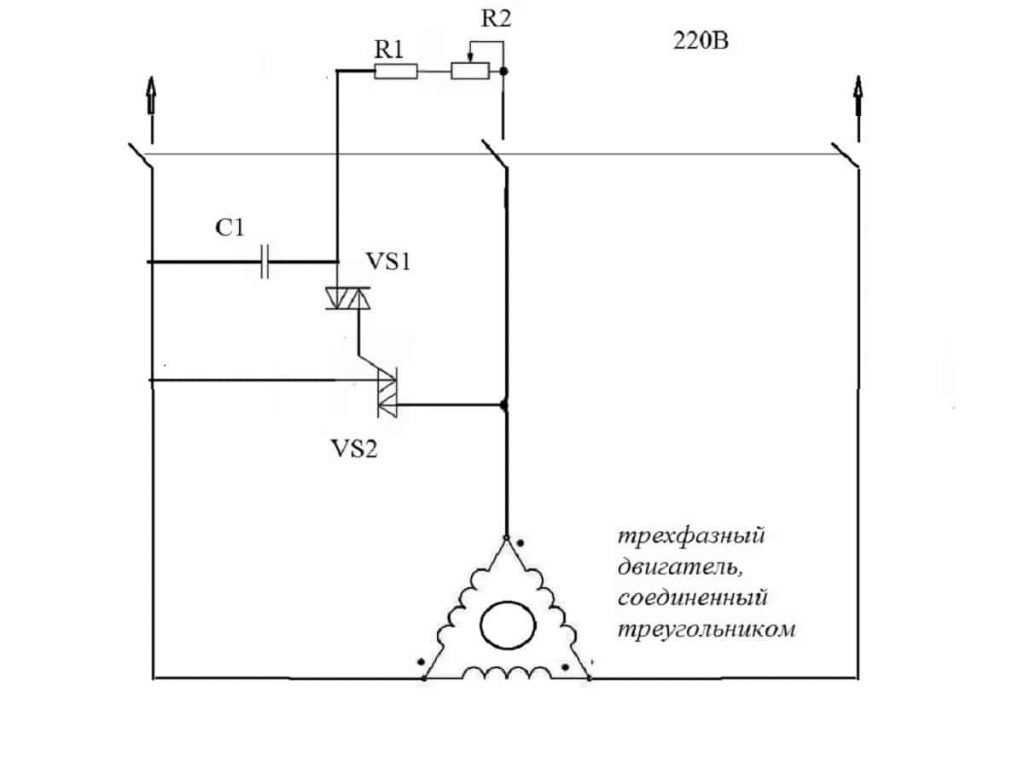 Поскольку такие устройства существуют и серийно выпускаются промышленностью, можно сделать вывод, что форма сигнала не важна. Гораздо важнее правильное фазирование обмоток двигателя — при нарушении этого условия двигатель не будет крутиться вообще или не будет набирать обороты. Для понимания процесса фазирования двигателя вспомним как выглядит 3х фазный переменный ток.
Поскольку такие устройства существуют и серийно выпускаются промышленностью, можно сделать вывод, что форма сигнала не важна. Гораздо важнее правильное фазирование обмоток двигателя — при нарушении этого условия двигатель не будет крутиться вообще или не будет набирать обороты. Для понимания процесса фазирования двигателя вспомним как выглядит 3х фазный переменный ток.
Глядя на график, можно сделать следующий простой вывод. Для обеспечения вращения двигателя надо подать на его фазные обмотки 6 импульсов, соответсвующие пикам каждой синусоды трехфазного тока. Соответсвенно, если использовать генератор импульсов имеющий 6 выходов последовательно выдающий импульс на каждый выход можно обеспечить создание вращающего магнитого поля внутри двигателя, что заставит последний вращаться. Если предствить, что каждая обмотка двигателя имеет точки начала и конца, то приложение напряжения к обмотке «А» в прямой полярности (т.е. на начало обмотки подводится «+») обозначить как «А» и в обратной полярности (на начало обмотки в этом случае подводится «-») обозначить как «А’» то полная схема коммутации обмоток примет следующий вид:
1. «А»
«А»
2. «C’»
3. «B»
4. «А’»
5. «C»
6. «B’»
Подавая такую последовательность импульсов на обмотки двигатель придет в движение. Форма импульсов (сунус или меандр) при этом совершенно не важна. Перед подключением двигателя следует его сфазировать. Для этого, собираем цепь от низковольтного источника питания 12-24V в разрыв которой включаем лампу (чтобы не сжечь двигатель или блок питания) и последовательно касаемся щупами клемм колодки двигателя, согласно схеме преведенной выше. Двигатель в этом случае, начнет немного вращаться. После того, как фазы и начала обмоток точно определены их следует пометить. Это будет важно при подключении двигателя к собранному устройству.
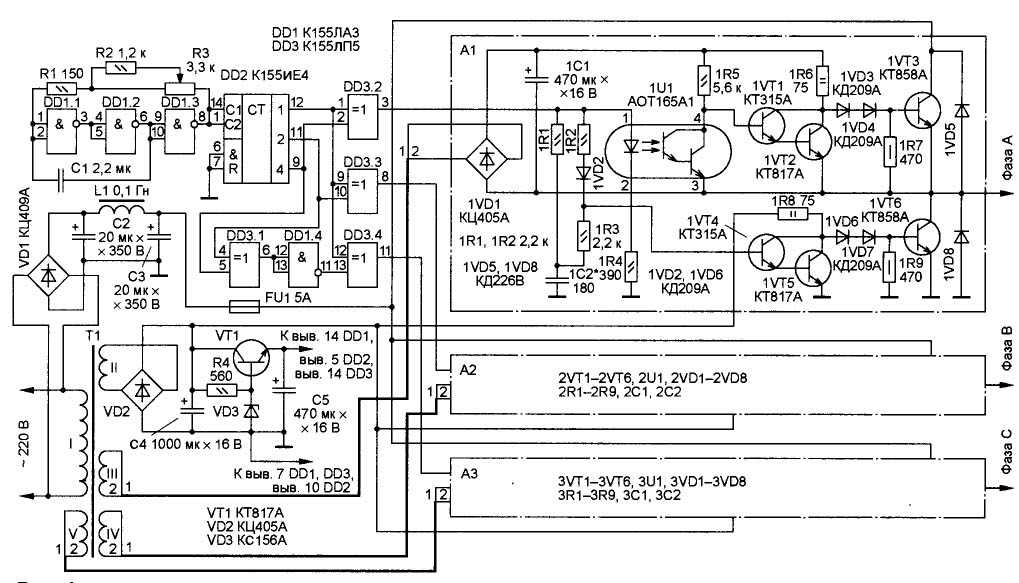
Схема источника питания состоит из трех фукнциональных блоков. Общая или силовая часть. Генератор импульсов. Инвертор напряжения. В целях снижения трудоемкости при изготовлении, а также, снижения помех, силовую часть и генератор целесообразно выполнить на одной плате. Инвертор может быть отдельным устройством (при питании от батареи) или его может не быть вообще в случае питания от осветительной сети.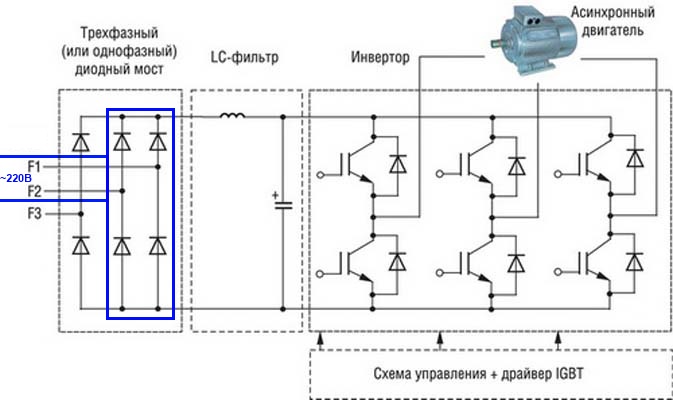 Последний способ не рекомендуется по причине опасности — в этом случае, часть элементов схемы может оказаться под смертельно опысным относительно «земли» напряжением, поэтому для отладки устройства такой способ нежелателен.
Последний способ не рекомендуется по причине опасности — в этом случае, часть элементов схемы может оказаться под смертельно опысным относительно «земли» напряжением, поэтому для отладки устройства такой способ нежелателен.
Как отмечалось выше, генератор импульсов выдает последовательно 6 импульсов, необходимых для обеспечения создания вращающегося магнитного поля в двигателе. Между импульсами отсутствуют «мертвые» интервалы — в данной схеме смысл в них отсутствует. Частота импульсов задается частотой тактового генератора, для получения номинальной частоты 50 Гц необходима частота генератора 300 Гц. Генератор имеет воможность регулировки частоты с помощью переменного резистора. Каждый импульс на выходе генератора содержит пакет из серии импульсов частотой около 8 кГц, необходимый для управления тиристорами в силовой части схемы. Безусловно, тиристорами можно управлять постоянным током (токовым импульсом) однако такой способ нецелесообразен. Дело в том, что при таком способе управления потребуется применять другие способы «отвязки» генератора от силовой части — например использовать трансформаторы на «железе» или конденсаторы значительной емкости, что негативно скажется на надежности работы устройства.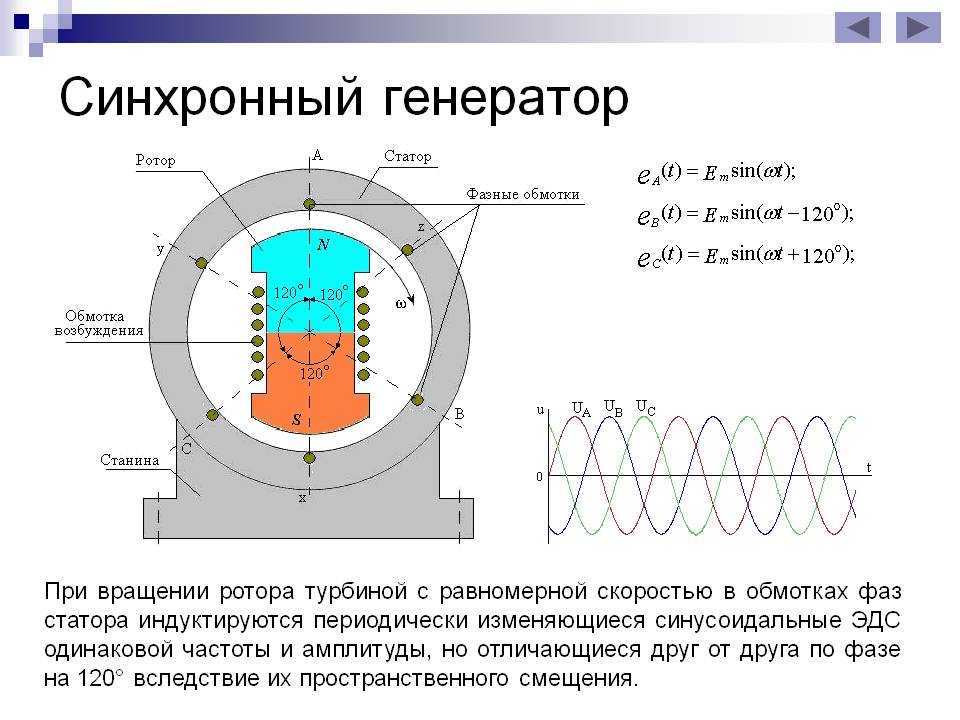 Также, управление тиристорами постоянным током энергозатратно — потребуются мощные ключи. Решение с развязывающими импульсными трансформаторами для данной схемы практически идеально т.к. такое управление решает сразу множетство проблем. Итак, каждый из выходов импульсного генератора связан с первичной обмоткой трансформатора. Когда транзистор в цепи выхода генератора открыт (при лог. 1 на соответсвующем выходе микросхемы счетчика) в первичную обмотку трансформатора поступает пачка импульсов частотой 8 кГц, которая возбуждает такие-же импульсы во вторичной обмотке, связанной с управляющим электродом тиристора т.е. образуется цепь: катод тиристора — обмотка трансформатора — управляющий электрод. Важно отметить, что в данном случае важно привильное фазирование обмотки трансформатора: на управляющий электрод должны приходить импульсы положительной полярности! Таким образом, схема коммутации обеспечивает создание вращающегося магнитного поля внутри двигателя. Ниже приводится сигналограмма на управляющем электроде любого из тиристоров.
Также, управление тиристорами постоянным током энергозатратно — потребуются мощные ключи. Решение с развязывающими импульсными трансформаторами для данной схемы практически идеально т.к. такое управление решает сразу множетство проблем. Итак, каждый из выходов импульсного генератора связан с первичной обмоткой трансформатора. Когда транзистор в цепи выхода генератора открыт (при лог. 1 на соответсвующем выходе микросхемы счетчика) в первичную обмотку трансформатора поступает пачка импульсов частотой 8 кГц, которая возбуждает такие-же импульсы во вторичной обмотке, связанной с управляющим электродом тиристора т.е. образуется цепь: катод тиристора — обмотка трансформатора — управляющий электрод. Важно отметить, что в данном случае важно привильное фазирование обмотки трансформатора: на управляющий электрод должны приходить импульсы положительной полярности! Таким образом, схема коммутации обеспечивает создание вращающегося магнитного поля внутри двигателя. Ниже приводится сигналограмма на управляющем электроде любого из тиристоров.
несколько импульсов
Нет необходимости описывать коммутацию каждой обмотки, идея, надеюсь, понятна. Чтобы заработало нужно просто правильно собрать схему и сфазировать обмотки двигателя а также импульсные трансформаторы. Сейчас важно рассмотреть работу любой отдельной фазы для понимания механизма рекурперации энергии. Представим, что конденсатор, подключенный к обмотке фазы «А» полностью заряжен. В момент поступления на управляющий электрод тиристора сигнала, тиристор открывается. Ток начинает течь по цепи из конденсатора через обмотку и через открытый тиристор. В какой-то момент сила тока нарастает до такого состояния, что образованное вокруг катушки магнитное поле толкает ротор двигателя. Далее, энергия запасенная конденсатором начинает иссякать, его заряд постепенно истощается. В этот момент, энергия мигнитного поля внутри двигателя начинает наводить вокруг фазной обмотки ЭДС самоиндкукции, причем направление течения тока в цепи при этом не изменяется. Обмотка двигателя в этот момент сама становится источником энергии и начинается процесс заряда конденсатора напряжением с обратным знаком. Процесс продолжается до тех пор, пока энергия магнитного поля вокруг обмотки не иссякнет. В момент прекращения течения тока в цепи тиристор закрывается сам по себе. Поскольку открытый тиристор работает также как диод, в данной цепи не могут начаться гармонические затухающие колебания. Энергия, запасенная конденсатором (только с обратным знаком) в этот момент пригодна для последующего использования! Поскольку в схеме есть потери, требуется принятие специальных мер для постоянного пополнения запаса эненргии в фазных конденсаторах, рассмотрим этот важный процесс. В тот момент, когда конденсатор фазы «А» заряжен напряжением с обратным знаком, рано или поздно, потребуется пропустить этот заряд через обмотку двигателя. Когда этот момент наступает, просходит процесс, аналогичный тому, что описан выше. Разница состоит в том, что по завершению этого процесса, на конденсаторе теперь положительное напряжение, соответсвующее (по знаку) напряжению источника питания. Как отмечалось выше, в схеме всегда есть потери, поэтому напряжение на конденсаторе будет меньше исходного т.
Процесс продолжается до тех пор, пока энергия магнитного поля вокруг обмотки не иссякнет. В момент прекращения течения тока в цепи тиристор закрывается сам по себе. Поскольку открытый тиристор работает также как диод, в данной цепи не могут начаться гармонические затухающие колебания. Энергия, запасенная конденсатором (только с обратным знаком) в этот момент пригодна для последующего использования! Поскольку в схеме есть потери, требуется принятие специальных мер для постоянного пополнения запаса эненргии в фазных конденсаторах, рассмотрим этот важный процесс. В тот момент, когда конденсатор фазы «А» заряжен напряжением с обратным знаком, рано или поздно, потребуется пропустить этот заряд через обмотку двигателя. Когда этот момент наступает, просходит процесс, аналогичный тому, что описан выше. Разница состоит в том, что по завершению этого процесса, на конденсаторе теперь положительное напряжение, соответсвующее (по знаку) напряжению источника питания. Как отмечалось выше, в схеме всегда есть потери, поэтому напряжение на конденсаторе будет меньше исходного т.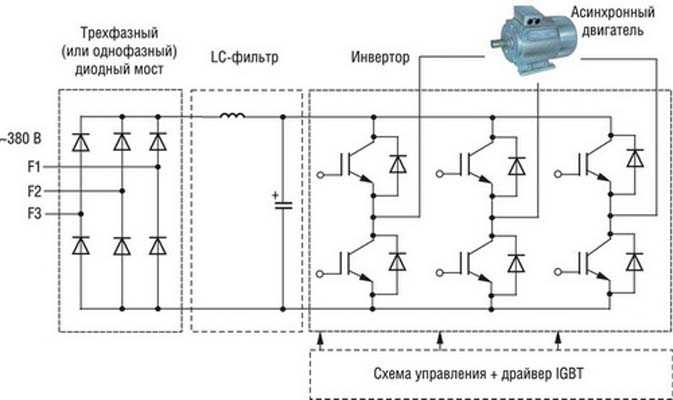 е. напряжения питания. Поскольку знак напряжения на конденсаторе совпадает со знаком напряжения источника питания, в этот благоприятный момент целесообразно выполнить регенерацию энергии, для чего по сигналу из соседней фазы, открывается соответсвующий тиристор и конденсатор пополняется энергией.
е. напряжения питания. Поскольку знак напряжения на конденсаторе совпадает со знаком напряжения источника питания, в этот благоприятный момент целесообразно выполнить регенерацию энергии, для чего по сигналу из соседней фазы, открывается соответсвующий тиристор и конденсатор пополняется энергией.
Требует поясненения цепь регенерации энергии. Известно, что имея заряженный конденсатор невозможно «напрямую» зарядить от него другой конденсатор так, чтобы напряжение на последнем было выше или равно исходному напряжению на первом конденсаторе. Поэтому, в цепи заряда применен дроссель. Однако, на самом деле, никакой это не дроссель, а часть контура, образованного с одной стороны конденсатром в инверторе большой емкости, катушкой дросселя, открытым тиристором и фазным конденсатором, заряд которого осуществляется в данный момент времени. Когда тиристор открывается, огромная энергия запасенная элекролитическим конденсатором большой емкости устремляется в обмотку дросселя, вокруг последней создается мощное магнитное поле.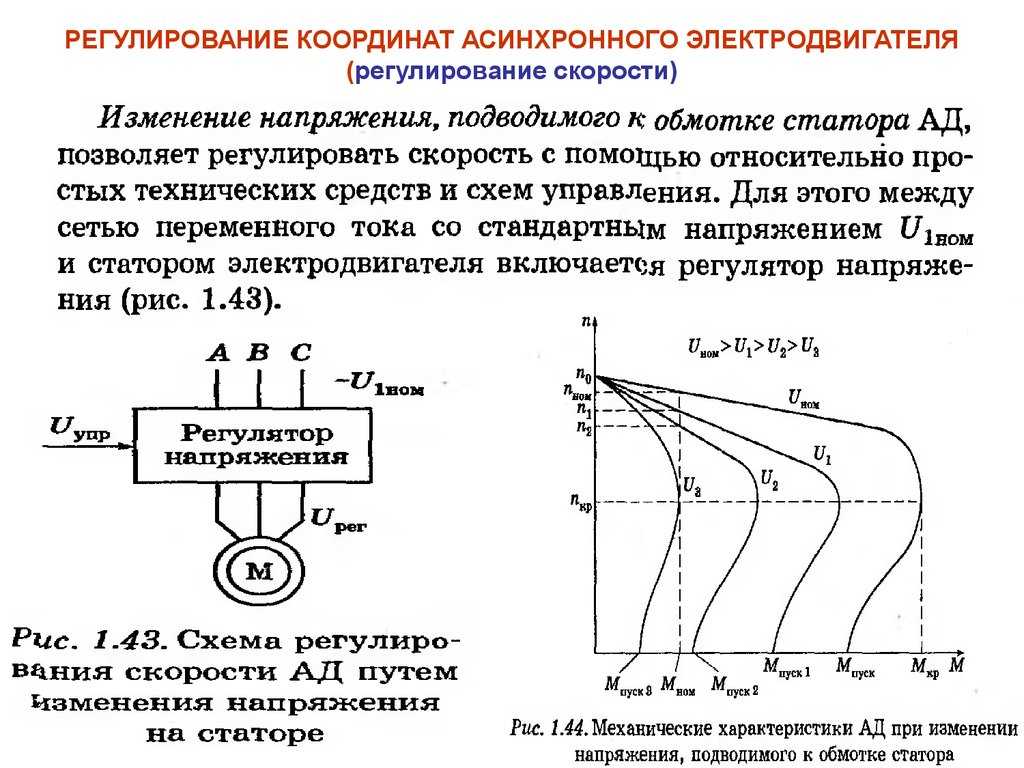 В какой-то момент, энергия магнитного поля начинает спадать и токи самоиндукции превращают дроссель в источник энергии. В итоге, фазный конденсатор заряжается несколько выше напряжения питания, а электролитический конденсатор немного разряжается, отчего создается разность потенциалов, которая не позволяет дальнейшее течение тока из источника питания в фазный конденсатор, тиристор в этот момент закрывается. Независимо от наличия или отсутствия на нем управляющих импульсов ток в этой цепи уже не потечет поскольку фазный конденсатор заряжен больше источника питания. Таким образом, полная таблица коммутации двигателя с учетом регенерации энергии принимает следующий вид:
В какой-то момент, энергия магнитного поля начинает спадать и токи самоиндукции превращают дроссель в источник энергии. В итоге, фазный конденсатор заряжается несколько выше напряжения питания, а электролитический конденсатор немного разряжается, отчего создается разность потенциалов, которая не позволяет дальнейшее течение тока из источника питания в фазный конденсатор, тиристор в этот момент закрывается. Независимо от наличия или отсутствия на нем управляющих импульсов ток в этой цепи уже не потечет поскольку фазный конденсатор заряжен больше источника питания. Таким образом, полная таблица коммутации двигателя с учетом регенерации энергии принимает следующий вид:
1. «А»
2. «C’» — Rb
3. «B»
4. «А’» — Rc
5. «C»
6. «B’» — Ra
где Rx сигнал регенерации энергии в фазном конденсаторе соответсвующей фазы.
Именно поэтому 3 из 6 импульсных трансформаторов двухобмоточные: вторая обмотка управляет тиристором в цепи регенерации энергии. Сигнал на фазном конденсаторе при работающем двигателе представлен в следующей осцилограмме:
Более крупно:
Двойная линия внизу — это глюк фотоаппарата.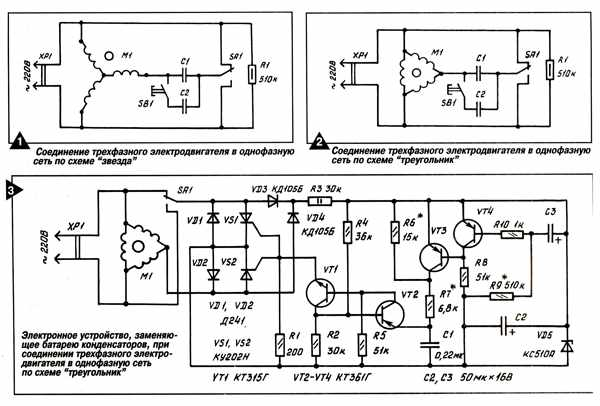 Просто «синусоида» немного покачивается когда двигатель вращается.
Просто «синусоида» немного покачивается когда двигатель вращается.
Фотогалерея устройства. Опытный асихронный двигатель 0.6 кВт 1350 об/мин R обмоток 12 Ом. пр-во ГДР, 1970 г.в.
Блок управления и силовая часть. Между электроникой и тиристорами импульные трансформаторы. Толстые провода к двигателю.
Банк фазных конденсаторов 3×10 мкф 250 в.. К одному из них через резистор на 10 мОм подключен щуп осциллографа.
Дроссель, через который осуществляется регенерация энергии. Рядом конденсатор 470 мкф и предохранитель. Опасные штучки 😉
Инвертор 12 -> 200
В завершение, несколько ведео работающего устройства:
Запуск асинхронного двигателя
Работа асинхронного двигателя
Налаживание устройства
Перед включением устройства следует проверить правильность монтажа. Особенно тщательно нужно проверить отсутствие межобмоточных замыканий импульсных трансформаторов. В случае замыкания, разнесет не только тиристоры но и низковольтную электронику. После выполнения проверок следует подать низковольтное питание на схему. Внимание! На данном этипа ни в коем случае не подавать на силовую часть никакое напряжение! Это можно сделать после того, как будет проверена и отлажена слаботочная часть схемы. Включив питание управления +12 V сразу проверяем ток. Он не должен превышать 70-100 мА, если ток значительно больше — где-то в схеме КЗ или дохлая(е) микросхемы и т.д. Если ток меньше 50 мА где-то в цепях обрыв. Проверьте еще раз монтаж схемы. Если ток в норме, первым делом следует проверить напряжение на выходе внутреннего стабилизатора +9 V.
После выполнения проверок следует подать низковольтное питание на схему. Внимание! На данном этипа ни в коем случае не подавать на силовую часть никакое напряжение! Это можно сделать после того, как будет проверена и отлажена слаботочная часть схемы. Включив питание управления +12 V сразу проверяем ток. Он не должен превышать 70-100 мА, если ток значительно больше — где-то в схеме КЗ или дохлая(е) микросхемы и т.д. Если ток меньше 50 мА где-то в цепях обрыв. Проверьте еще раз монтаж схемы. Если ток в норме, первым делом следует проверить напряжение на выходе внутреннего стабилизатора +9 V.
Далее, проверяем работу генератора импульсов на микросхеме NE 555. К выходу микросхемы подключаем осциллограф и смотрим сигнал. Должны присутствовать короткие (около 20 мксек) импульсы с амплитудой близкой к напряжению источника питания. Частота импульсов должна быть около 8 кГц. Убедившись в работоспособности этого узла проверяем генератор на намкросхеме К561ЛА7. С выхода генератора должны поступать симетричные прямоугольные импульсы, чатота которых, в зависимости от положения движка переменного резистора «обороты» должна быть в пределах от 30 до 500 Гц.
Теперь разбираемся в микросхемой К561ИЕ8 — с ее помощью осуществляется формирование фазных управляющих импульсов. Данная микросхема представляет из себя десятичный счетчик, формирующий последовательно на каждом выходе сигнал логической «1» по спаду тактового импульса. Для проверки правильности работы этой микросхемы и монтажа, в задающем генераторе вместо конденсатора номиналом 10n временно устанавливаем конденсатор 1 мкф. Включаем устройство и смотрим на светодиоды, подключенные к выходам микросхемы К561ИЕ8. При исправной микросхеме должны последовательно зажигаться светодиоды с 1 по 6 и так по кругу. В работающем устройстве, естественно, все диоды будут просто светиться т.к. глаз человека не в состоянии видеть сигнал частотой выше 25 Гц. Все светодиоды должны светиться с одинаковой яркостью. В случае обрыва обмотки импульсного трансформатора, неисправности транзистора и т.д. диод светиться не будет или будет светиться в «пол накала». Именно поэтому в схеме вместо диодов используются светодиоды — для удобства отладки. Убедившись, что все в порядке, убираем конденсатор из генератора на 1 мкф. Включаем устройство и регулируем переменным резистором частоту тактового генератора. При наименьшей частоте светодиоды будут немного мерцать (особенно хорошо это видно боковым зрением) а при максимальной — светиться. При этом, работающая схема будет издавать характерный «писк», что свидетельсвует о том, что в первичные обмотки импульсных трансформаторов поступают управляющие импульсы.
Убедившись, что все в порядке, убираем конденсатор из генератора на 1 мкф. Включаем устройство и регулируем переменным резистором частоту тактового генератора. При наименьшей частоте светодиоды будут немного мерцать (особенно хорошо это видно боковым зрением) а при максимальной — светиться. При этом, работающая схема будет издавать характерный «писк», что свидетельсвует о том, что в первичные обмотки импульсных трансформаторов поступают управляющие импульсы.
Разбираемся с управляющими сигналами тиристоров. Еще раз проверяем разводку вторичных обмоток импульсных трансформаторов. Если все сделано правильно фазируем трансформаторы. Для этого «отвязываем» корпус осциллографа от земли и проверяем сигнал в цепи управляющего электрода каждого тиристора. Землю осциллографа «крокодилом» цепляем к катоду исследуемого тиристора, а щуп подключаем к управляющему электроду. На экране должны присутствовать пакеты импульсов ПОЛОЖИТЕЛЬНОЙ полярности (см. осцилограмму в начале файла) амплитудой не менее 5V. Так нужно последовательно проверить все теристоры с схеме. На всех должен присутствовать управляющий сигнал. Закончив с этим, можно начать подавать питание на силовую часть схемы.
Так нужно последовательно проверить все теристоры с схеме. На всех должен присутствовать управляющий сигнал. Закончив с этим, можно начать подавать питание на силовую часть схемы.
Важное замечаение. Помните, что импульсная техника не прощает ошибок! Если что-то пойдет не так, огромная энергия запасенная электролитическим конденсатором большой емкости вынесет тиристоры — сразу несколько штук. Будет примерно следующее:
А всего-то делов: причина была в дребезге контактов в переменном резисторе подстройки оборотов. В какой-то момент цепь обрывалась, частота тут-же возрастала в несколько раз, схема тут-же захлебавалась. Сквозные токи от источника питания (электролитического конденсатора) перли через тиристоры. Неравный бой между тиристорами и электролитическим конденсатором большой емкости всегда заканчивался победой последнего, результат — на картинке. В догонку, вынесло еще TL 494 в инверторе и мосфет IRF 1010. Печально, такой ущерб из-за коппечной детали. И хороший урок.
Теперь переходим к самому интересному. Подаем на силовую часть сначала низковольтное питание от источника 12-24V через лампу на 5 Вт. Включаем сначала блок управления, ставим минимальную частоту оборотов. Далее, плавно поднимаем напряжение питания силовой части до 15-20 V. Смотрим на лампу. Светиться она не должна. Еще лучше, в разрыв питания силовой цепи включить амперметр: в случае нормальной работы устройства (работают контуры всех трех фаз) ток составит несколько миллиампер при таком напряжении питания и минимальной частоте. Если ток значительно больше (горит или светится в пол накала лампа) прут сквозные токи через схему. Если тока нет вообще — тиристоры не открываются. В случае нормального тока смотрим что происходит на конденсаторах. Сигнал должен быть примерно такой:
Так нужно проверить все 3 фазы. Наличие такого сигнала свидетельствует от том, что схема работает. Теперь искуственно вводим схему в режим захлебывания чтобы определить примерную максимальную чатоту тактового генератора. Для этого плавно увеличиваем частоту и смотрим на лампу. Как только лампа загорится — схема захлебнулась. При низком напряжении питания это не страшно — токи при таком напряжении не смертельны для тиристоров. Измеряем частоту генератора в этом случае. У меня получилось около 500 Гц т.е. 500/6=83 Гц на каждую фазу. Характерно, но в работающем двигателе значение частоты при которой наступает захлебывание несколько меньше. Определив предельную частоту можно начать подачу высокого напряжения на силовую часть.
Для этого плавно увеличиваем частоту и смотрим на лампу. Как только лампа загорится — схема захлебнулась. При низком напряжении питания это не страшно — токи при таком напряжении не смертельны для тиристоров. Измеряем частоту генератора в этом случае. У меня получилось около 500 Гц т.е. 500/6=83 Гц на каждую фазу. Характерно, но в работающем двигателе значение частоты при которой наступает захлебывание несколько меньше. Определив предельную частоту можно начать подачу высокого напряжения на силовую часть.
Включаем генератор, ставим минимальную частоту. Включаем инвертор и плавно увеличиваем напряжение на его выходе. Следим за током потребляемым устройством. Он должен начать расти по мере увеличения напряжения на выходе инвертора. Одновременно, смотрим напряжение на выходе инвертора. Если все идет хорошо, при 50 V двигатель начнет гудеть, при 150 V вал тронется, при 200 V начнет уверенный набор оборотов. Далее, наступит вход в режим синхронизации, гул и гудение снизится, а ток в цепи батареи составит около 3А. Если схема все еще жива, увеличиваем обороты двигателя до номинальных. Это легко т.к. двигатель уже синхронизирован, набор оборотов пройдет очень быстро. Ток при этом подскочит (в момент раскрутки) до 7-10А и тут-же упадет до 4.5 А после набора оборотов. Наслаждайтесь работой устройства. В этот момент следует проверить отсутствие нагрева деталей схемы (аккуратно!), измерить обороты вала, попробовать притормозить вал рукой, следя за потребляемым током.
Если схема все еще жива, увеличиваем обороты двигателя до номинальных. Это легко т.к. двигатель уже синхронизирован, набор оборотов пройдет очень быстро. Ток при этом подскочит (в момент раскрутки) до 7-10А и тут-же упадет до 4.5 А после набора оборотов. Наслаждайтесь работой устройства. В этот момент следует проверить отсутствие нагрева деталей схемы (аккуратно!), измерить обороты вала, попробовать притормозить вал рукой, следя за потребляемым током.
Для контроля оборотов и формы сигнала на фазе следует поключить к одному из фазных конденсаторов через резистор на 10 мОм щуп осциллографа и через резистор на 500 кОм частотомер (китайский мультиметр поддерживающий измерение частоты). Далее, следя за формой сигнала можно увеличить частоту до 100 Гц или выше, пока схема не захлебнется. Это нужно делать с осторожностью (см. выше) т.к. в этом случае сквозными токами вынесет тиристоры. Как показала практика, двигатель легко раскрутить до двойной частоты на каждой фезе, но делать этого все-же не стоит.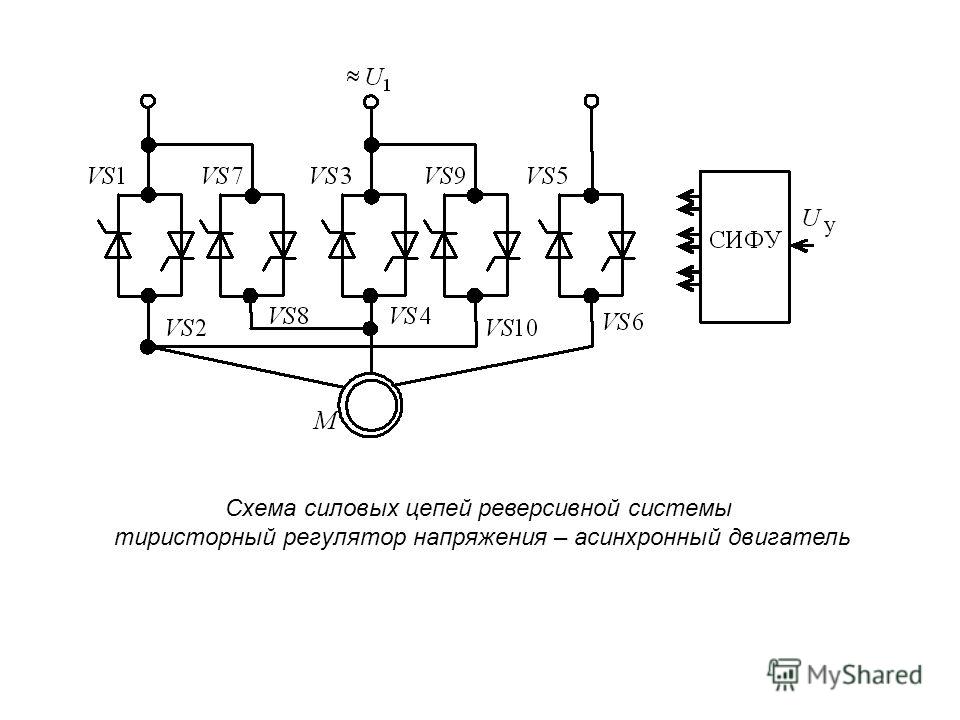
Вопросы, пожелания?
Пишите [email protected]
Эффективный источник питания асинхронного двигателя
Description
Переработка схемы генератора импульсов (вместо логики используется Attiny13) + инвертора 12-220 В DC-DC + силовой части для управления вращением асинхронного двигателя. Планируется использовать для электро-велосипеда.
Копию оригинальной статьи, на основе которой создан проект, можно почитать здесь
https://eurosamodelki.ru/katalog-samodelok/alternativnaja-energetika/effektivnii-istochnik-pitanija-asinhronnogo-dvigatelja
design drawing
schematic diagram
(
1
/
)
PCB
(
1
/
)
Empty
| ID | Name | Designator | Footprint | Quantity |
|---|---|---|---|---|
| 1 | 1u | C1,C2 | C0603 | 2 |
| 2 | 0.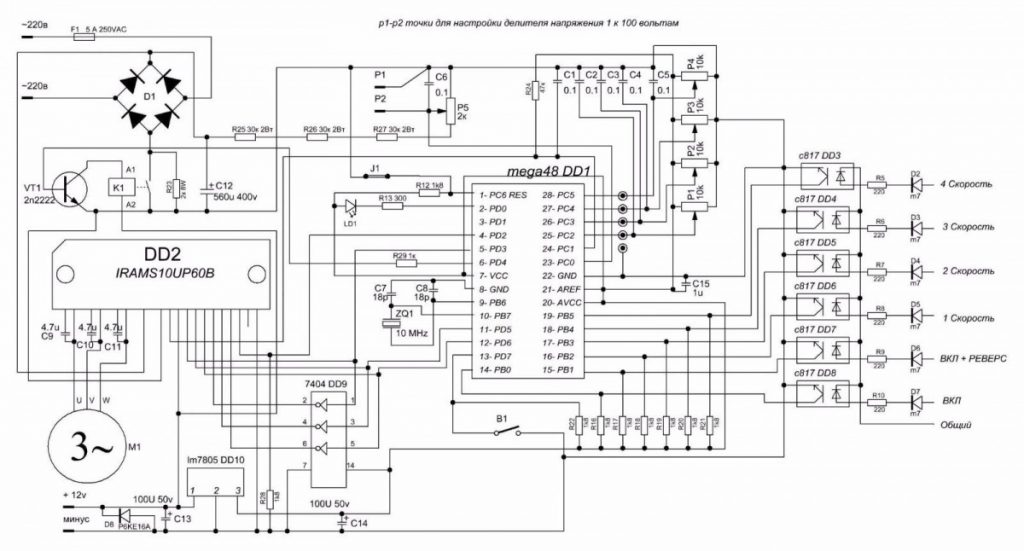 1u 1u |
C3 | C0603 | 1 |
| 3 | HDR-M-2.54_1x1 | J1,J2,J3,J4,J5,J6 | HDR-M-2.54_1X1 | 6 |
| 4 | MOSI | J7 | HDR-M-2.54_1X1 | 1 |
| 5 | MISO | J8 | HDR-M-2.54_1X1 | 1 |
| 6 | SCK | J9 | HDR-M-2.54_1X1 | 1 |
| 7 | VCC | J10 | HDR-M-2.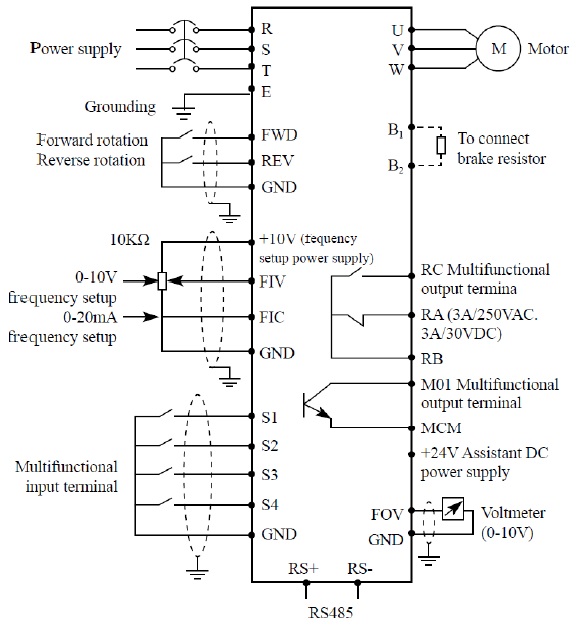 54_1X1 54_1X1 |
1 |
| 8 | GND | J11 | HDR-M-2.54_1X1 | 1 |
| 9 | RST | J12 | HDR-M-2.54_1X1 | 1 |
| 10 | MMBT3904-C20526 | Q1,Q2,Q3,Q4,Q5,Q6 | SOT-23-3_L2.9-W1.3-P1.90-LS2.4-BR | 6 |
| 11 | 130 | R1,R2,R3,R4,R5,R6 | R0603 | 6 |
| 12 | 50 | R7 | R0603 | 1 |
| 13 | 5k | RP1 | RES-ADJ-TH_3386P | 1 |
| 14 | MCP1703T-5002E/CB | U2 | SOT-23-3_L2. 9-W1.3-P1.90-LS2.4-BR 9-W1.3-P1.90-LS2.4-BR |
1 |
| 15 | ATTINY13A-SU | U4 | SOIC-8_L5.3-W5.3-P1.27-LS8.0-BL | 1 |
| 16 | 74HC4024D,653 | U5 | SOP-14_L8.6-W3.9-P1.27-LS6.0-BL | 1 |
| 17 | 1000 | C4 | RAD-0.1 | 1 |
| 18 | 0.22u | C5,C7 | RAD-0.1 | 2 |
| 19 | 1000uF | C6 | CAP-TH_BD10.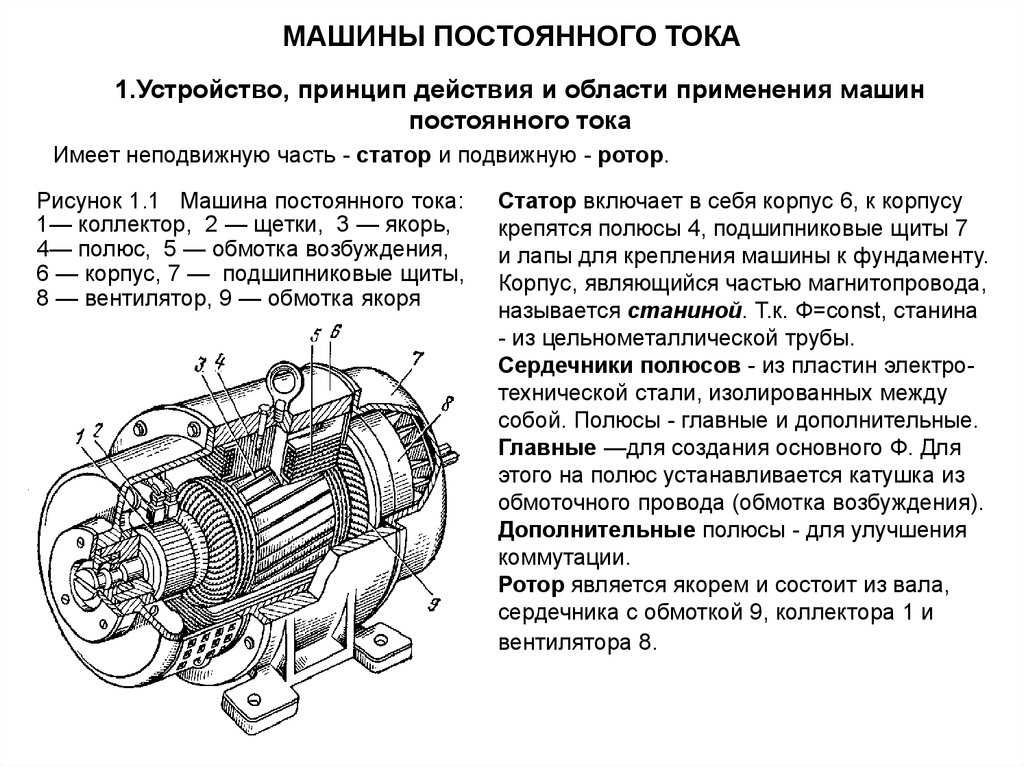 0-P5.00-D1.0-FD 0-P5.00-D1.0-FD |
1 |
| 20 | 470u | C8 | CAP-D3.0×F1.5 | 1 |
| 21 | 1N4148 | D1,D2 | DO-35_BD2.0-L4.0-P8.00-D0.5-FD | 2 |
| 22 | GBJ2510F | D3 | PB-TH_4P-L30.0-W4.6 | 1 |
| 23 | 1m | L1 | L0603 | 1 |
| 24 | LED-TH-5mm_R | LED7 | LED-TH_BD5. 0_RED 0_RED |
1 |
| 25 | BC558B | Q7,Q8 | TO-92-3_L4.9-W3.7-P1.27-L | 2 |
| 26 | IRF1010EZPBF | Q9,Q10 | TO-220AB-3_L10.3-W5.0-P2.54-L | 2 |
| 27 | 1.7k | R13 | R_AXIAL-0.3 | 1 |
| 28 | 2.6k | R14 | R_AXIAL-0.3 | 1 |
| 29 | 10k | R15 | R_AXIAL-0.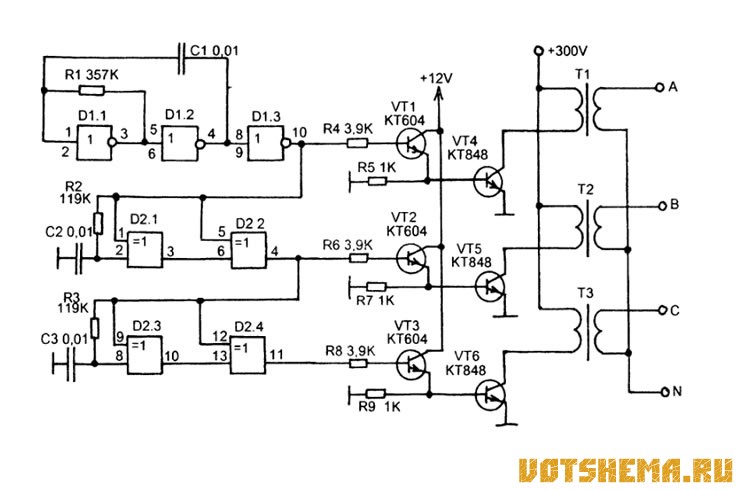 3 3 |
1 |
| 30 | 1k | R16,R17,R18 | R_AXIAL-0.3 | 3 |
| 31 | 10 | R19,R20 | R_AXIAL-0.3 | 2 |
| 32 | 1k | RP2 | RES-ADJ-TH_3386P | 1 |
| 33 | TL494CN | U1 | DIP-16_L19.3-W6.4-P2.54-LS7.6-BL | 1 |
Unfold
Project Attachments
Project Members
0
0
Collect to album
Loading.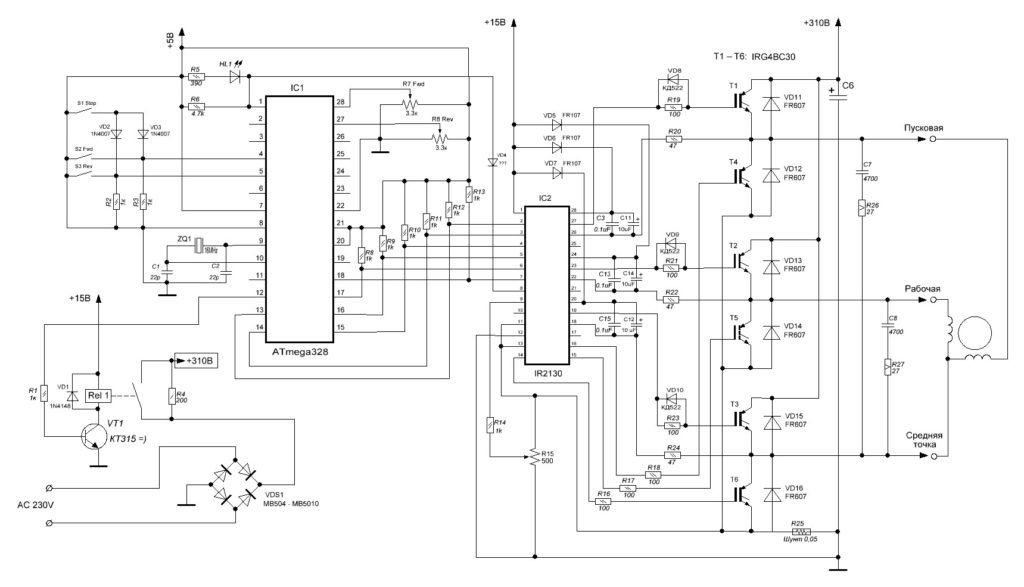 ..
..
Do you need to add this project to the album?
Forked project will be set private in personal workspace. Do you continue?
Send message to vladimir.lozhnikov
-
Fold
-
我要咨询
我要咨询
800821856
服务时间
周一至周五 9:00~18:00
- 0755 — 2382 4495
- 153 6159 2675
服务时间
周一至周五 9:00~18:00
-
立创EDA微信号
easyeda
-
QQ交流群
664186054
-
立创EDA公众号
lceda-cn
Высокоэффективные двигатели и экологичность — Электромоторостроение
Согласно некоторым исследованиям, на электродвигатели приходится около 45% общего потребления электроэнергии [1].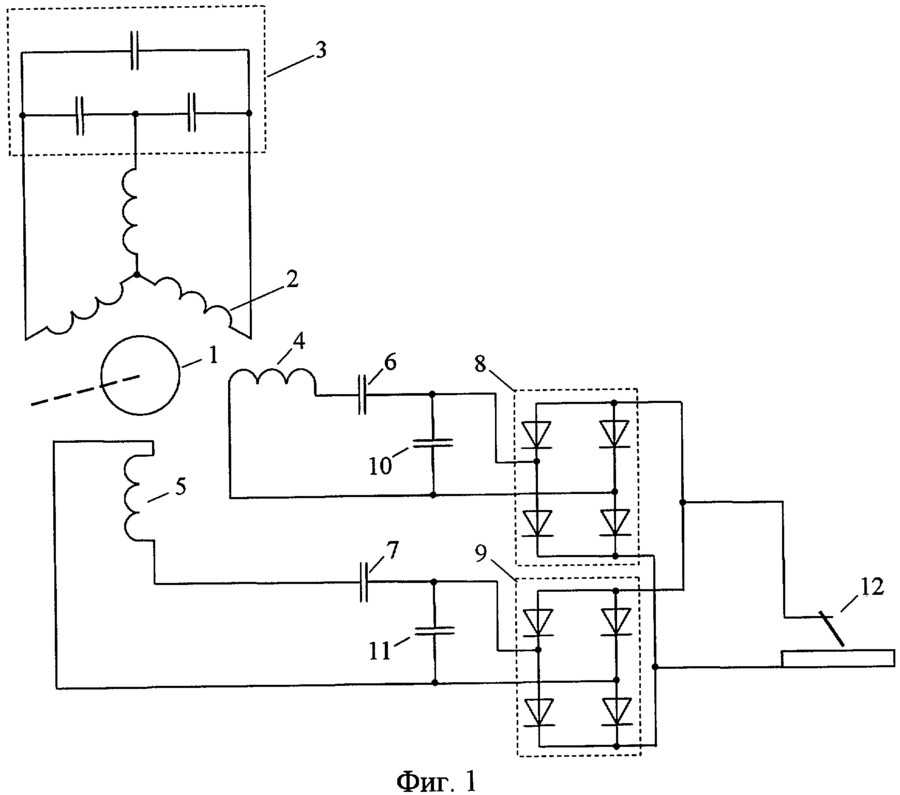 Если мы сосредоточим анализ на одной из самых энергозатратных областей, промышленной, процент, приписываемый двигателям, возрастет примерно до двух третей.
Если мы сосредоточим анализ на одной из самых энергозатратных областей, промышленной, процент, приписываемый двигателям, возрастет примерно до двух третей.
Учитывая, что некоторые из эксплуатируемых в настоящее время машин устарели, становится очевидным, что замена их новыми более эффективными двигателями приведет к важным преимуществам для окружающей среды и использования ресурсов, а также к снижению производственных затрат и, следовательно, к повышению конкурентоспособности. По их оценкам, например, только в Европе использование передовых приводных технологий вместо устаревших может привести к сокращению годового потребления на 135 ТВтч и выбросов CO 2 выбросов на 69 млн т [2]. Оценивая весь жизненный цикл двигателя в постоянной эксплуатации, можно убедиться, что расходы, связанные с потреблением энергии, составляют далеко не главный процент в общей стоимости (даже более 90%, [3]).
По этим причинам в Европейском Союзе , а также в США, Китае и других странах действуют нормативные планы, предусматривающие обязательное соблюдение постепенно повышающихся требований к эффективности для новых установок. Согласно Минимальный стандарт энергоэффективности (MEPS), например, двигатели, выпущенные на рынок ЕС с января 2017 года в диапазоне мощностей от 0,75 до 375 кВт, должны иметь уровень эффективности IE3 или уровень эффективности IE2 при питании от инвертора (см. рис. 1). ), за очень редким исключением.
Согласно Минимальный стандарт энергоэффективности (MEPS), например, двигатели, выпущенные на рынок ЕС с января 2017 года в диапазоне мощностей от 0,75 до 375 кВт, должны иметь уровень эффективности IE3 или уровень эффективности IE2 при питании от инвертора (см. рис. 1). ), за очень редким исключением.
Рис. 1. Значения эффективности, соответствующие классам IE, определенным регламентом IEC/EN 60034-30-1:2014.
Благодаря технологии, наиболее распространенной сегодня среди двигателей, асинхронный двигатель один (или Асинхронный двигатель , IM), улучшения, требуемые в будущем, будут невозможны, по крайней мере, при разумных затратах и для всех диапазонов мощности. Эти аспекты в сочетании с другими факторами, такими как растущее осознание важности снижения энергопотребления, приводят к внедрению малораспространенных до сих пор двигателей, таких как синхронные двигатели с постоянными магнитами , [4][5]. Фактически, этот класс двигателей обладает собственными характеристиками, позволяющими заметно повысить эффективность и удельную мощность, в частности очень низкими потерями в роторе.
Даже если уже в восьмидесятые годы в промышленной автоматизации применялись «бесщеточные» серводвигатели (т.е. Surface Mount‑PMSM, SM‑PMSM), благодаря их прекрасной управляемости и высокой динамике применение электрических синхронных машин с ненамотанным ротором оставалось ограниченным. к конкретным приложениям в течение длительного времени. За последние несколько лет, наоборот, благодаря вышеупомянутым факторам, касающимся эффективности и снижения себестоимости двигателей и инверторов, внедрение этого типа двигателей заметно расширяется.
Классификация двигателей переменного тока
Большинство двигателей переменного тока (переменного тока) являются трехфазными, даже если есть некоторые исключения, например, в случае однофазных и шаговых двигателей (которые обычно являются двухфазными). Наиболее важное различие, как правило, между синхронными и асинхронными машинами, различие основано на том факте, что механическая скорость вращения в установившемся режиме строго связана (синхронность) или нет с частотой вращения магнитного поля статора. Это отличие конкретно выражается в том, что для создания момента в асинхронной машине необходимо наличие наведенных токов в роторе, тогда как в синхронной машине оно не нужно (и, наоборот, нежелательно).
Это отличие конкретно выражается в том, что для создания момента в асинхронной машине необходимо наличие наведенных токов в роторе, тогда как в синхронной машине оно не нужно (и, наоборот, нежелательно).
Синхронные машины характеризуются тем, что магнитное поле ротора геометрически связано с механическим положением самого ротора. Поле ротора может создаваться током, протекающим через обмотку (синхронные двигатели с фазным ротором), постоянными магнитами (синхронные с постоянными магнитами) или самим током статора, модулированным магнитной анизотропией ротора (синхронное сопротивление).
Конструктивно и ротор, и статор радиальных машин (которых, безусловно, большинство) изготавливаются пакетированием ферромагнитные пластины своевременно заглушены, решение направлено на сдерживание паразитных токов. Ротор обычно имеет цилиндрическую форму и может быть оборудован отсеками для размещения постоянных магнитов или проводящего материала.
На рис. 2 схематично показаны сечения только что перечисленных двигателей различных типов (за исключением синхронного с фазным ротором).
2 схематично показаны сечения только что перечисленных двигателей различных типов (за исключением синхронного с фазным ротором).
Рис. 2. Различные конфигурации ротора (слева направо): асинхронный или асинхронный двигатель (АД), синхронный двигатель с внутренними постоянными магнитами (IPMSM), синхронные двигатели с внутренними постоянными магнитами с клеткой ротора (IPSMM с линейным пуском), поверхностные постоянные магниты синхронный двигатель (SM-PMSM) синхронный реактивный двигатель (SynRM).
Наиболее темные области (прорези) соответствуют обмоткам, синим цветом обозначены постоянные магниты, а серая зона сечения представляет ферромагнитный материал (ламинирование). Как видите, разница между различными типами двигателей сосредоточена в роторе, тогда как статор (за исключением особых случаев) может быть реализован таким же образом. В асинхронном двигателе пазы ротора заполнены сплавом, который представляет собой так называемую «беличью клетку», обычно изготавливаемую из алюминия или, в последнее время, из меди (с более высокими затратами, чтобы уменьшить потери).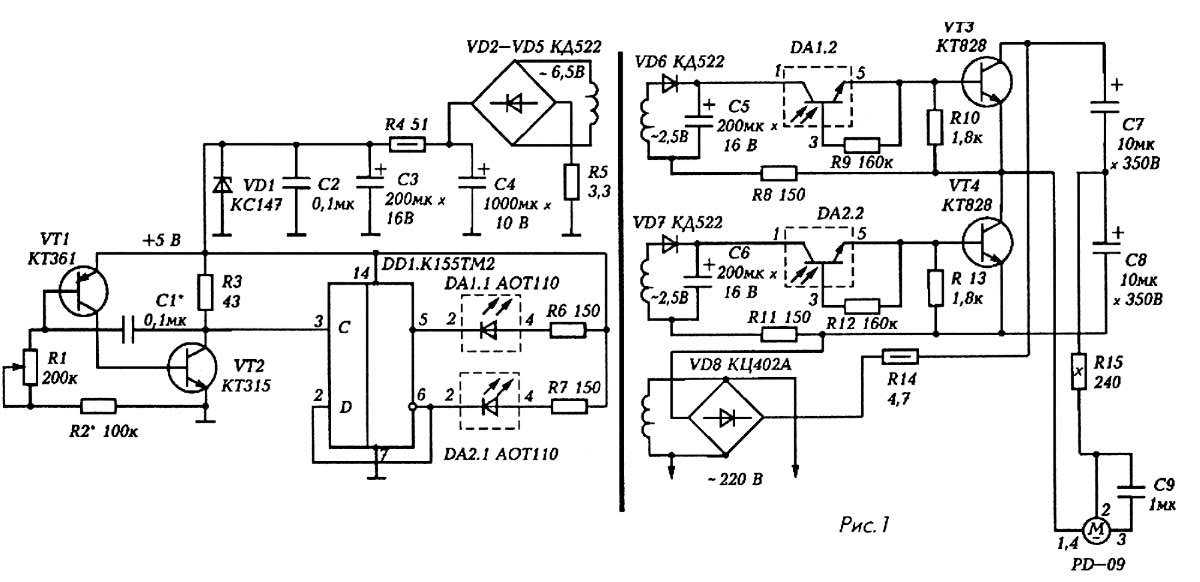
В двигателях с постоянными магнитами вместо этого магниты могут быть введены в соответствующие вырезы внутри конструкции ротора (IPMSM и IPMSM с линейным пуском) или установлены на поверхности в случае SM-PMSM. Вместо этого в случае SynRM вырезы внутри ротора просто пусты и называются «барьерами потока», поскольку они выполняют функцию увеличения сопротивления (то есть способности противодействовать прохождению магнитного потока) в одних направлениях, благоприятствуя другим пути, более характеризующиеся наличием железа).
В свою очередь, синхронные двигатели можно разделить по принципу создания крутящего момента. В двигателях с поверхностными постоянными магнитами создание крутящего момента происходит только благодаря взаимодействию между полем, создаваемым постоянными магнитами, и током статора.
Наоборот, в реактивных двигателях , используется тенденция системы минимизировать сопротивление магнитных путей, если они подвергаются возбуждению.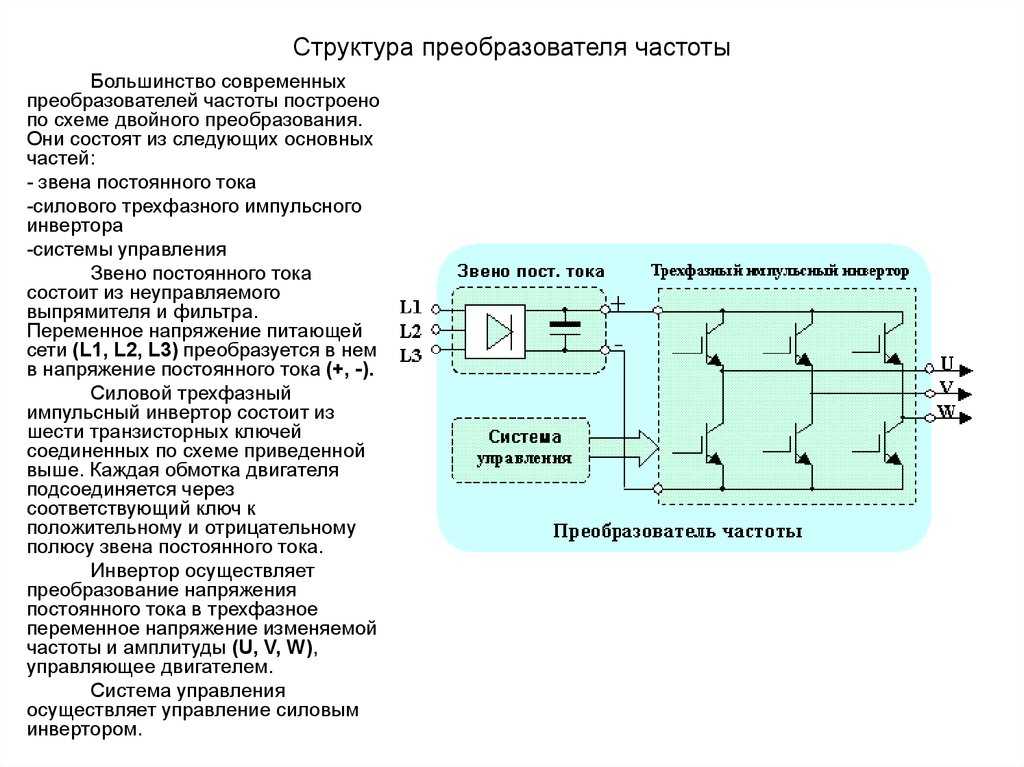 В двигателях с внутренним магнитом (IPMSM) обычно используются оба принципа.
В двигателях с внутренним магнитом (IPMSM) обычно используются оба принципа.
В производстве постоянных магнитов используются особые материалы для достижения высоких значений индукции и предотвращения риска размагничивания (обычно связанного с высокими температурами или сильным магнитным полем). Наиболее часто используемыми материалами являются неодим-железо-бор, самарий-кобальт и алюминий-никель-кобальт. Особенно в случае SM-PMSM количество активного магнитного материала велико, с большим весом сырья в общей стоимости. Это состояние усугубляется сильной изменчивостью цен на так называемые «редкоземельные элементы» [7], элементы, используемые в небольших количествах, но очень важные для качества магнита. Помимо проблем стоимости и доступности, эти материалы вызывают также важные экологические, политические и этические проблемы, связанные с их добычей, торговлей и удалением. По этим причинам огромные ресурсы вкладываются в исследования и разработки различных материалов и, особенно, в проекты двигателей, которые сводят к минимуму использование постоянных магнитов [8] или позволяют использовать так называемые ферриты, т. е. керамические магнитные материалы, в которых используются менее проблемные материалы.
е. керамические магнитные материалы, в которых используются менее проблемные материалы.
Электропитание через инвертор и управление
Недостаток синхронных двигателей заключается в невозможности питания их простым подключением к сети (Direct On‑Line, DOL), как это происходит с асинхронными двигателями. Поэтому для работы синхронных или реактивных двигателей с постоянными магнитами необходимо наличие «привода», т. е. целого, состоящего из реального инвертора (чисто электронного силового привода), электронного контроллера и реализованных в нем алгоритмов. Алгоритм управления, реализованный на цифровом устройстве, обновляется с частотой порядка 10 000 раз в секунду. Несмотря на дополнительные затраты, стоит учитывать возможность изменения условий работы, в частности скорости, что дает важные преимущества в ряде применений (особенно в насосах и вентиляторах, где это обеспечивает значительную экономию энергии).
Управляя инвертором в ШИМ (широтно-импульсной модуляции), можно эффективно генерировать напряжение, которое характеризуется амплитудой, частотой и произвольными фазами.
Поскольку в синхронных двигателях момент зависит от амплитуды тока и от его фазового соотношения с магнитной осью ротора, в алгоритмах управления обычно используется преобразование координат Парка, что приводит трехфазную систему к системе отсчета, интегральной с ось ротора (рис. 6).
Рис. 6. Слева: двигатель градирни с прямым приводом, без защитной оболочки; справа заглушка пластин статора (справа) (сайт ABB-Baldor).
Знание положения ротора необходимо для управления синхронным двигателем. В некоторых приложениях, где не требуются особые характеристики управления, можно отказаться от механического датчика положения из-за его стоимости и связанного с этим снижения надежности. На самом деле были разработаны «бессенсорные» методы управления, в которых положение ротора оценивается с использованием измерений тока и напряжения (внутри инвертора и в любом случае необходимых) и модели двигателя.
Бессенсорные технологии для синхронных двигателей, разрабатываемые с 90-х годов, первоначально нашли применение лишь в некоторых конкретных случаях.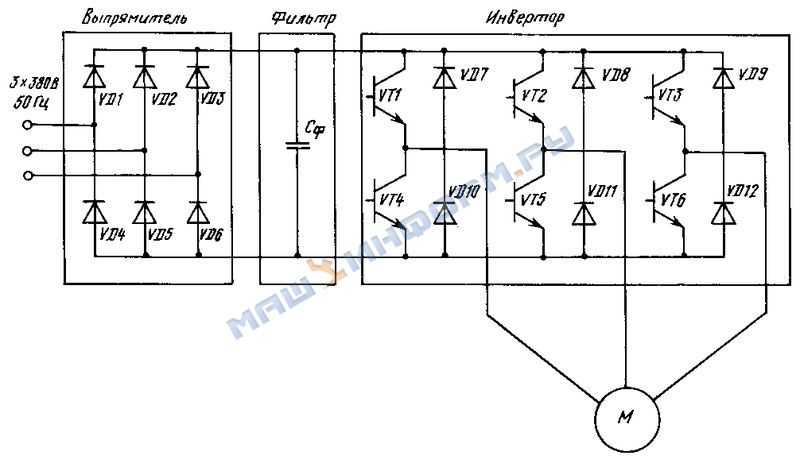 В продуктах, которые в настоящее время называются «инверторами», то есть в приводах общего назначения, первые алгоритмы этого типа были введены в конце 2000-х годов, а в последние годы они стали практически стандартным оборудованием. К сожалению, операторы автоматики до сих пор мало знают об этих решениях, даже если их эффективность была продемонстрирована, особенно в обычных приложениях, таких как насосы и вентиляторы.
В продуктах, которые в настоящее время называются «инверторами», то есть в приводах общего назначения, первые алгоритмы этого типа были введены в конце 2000-х годов, а в последние годы они стали практически стандартным оборудованием. К сожалению, операторы автоматики до сих пор мало знают об этих решениях, даже если их эффективность была продемонстрирована, особенно в обычных приложениях, таких как насосы и вентиляторы.
Поскольку данных, предоставляемых изготовителем двигателя, часто недостаточно для калибровки всех параметров алгоритма управления, были разработаны методы «самостоятельного ввода в эксплуатацию», другими словами ввод в эксплуатацию с минимальным вмешательством оператора. Первым шагом является автоматическая идентификация параметров («самоидентификация») методами, выполняемыми самим приводом, чтобы затем перейти к реальной калибровке, т. е. к выбору значений для параметров управления. И промышленность, и академический мир активно исследуют эти аспекты с очень интересными предложениями также в итальянской сфере [10]-[14].
Детали конструкции
Как уже было сказано, самая большая разница между различными типами двигателей переменного тока в основном заключается в конструкции ротора . На самом деле существуют различные случаи синхронных двигателей, предназначенных для сохранения других частей почти неизменными по сравнению с соответствующей асинхронной машиной (в конечном итоге с изменением витков обмотки). Такой подход получил распространение в последние несколько лет с целью удовлетворения общих приложений, а именно замены асинхронного двигателя. Помимо очевидных преимуществ в производственных затратах, использование эквивалентных деталей по габаритным размерам, опорам и внешним точкам крепления позволило внедрить эти двигатели без изменения остальной механики. В этом отношении инновационные примеры представлены продукцией итальянских компаний, такой как серия синхронных двигателей с внутренними постоянными магнитами и реактивных двигателей, показанных на рис. 5.9.0017 Рис. 4. Представление преобразования координат Парка в основе векторного управления.
5.9.0017 Рис. 4. Представление преобразования координат Парка в основе векторного управления.
В синхронных двигателях, , особенно в двигателях с постоянными магнитами, можно реализовать большое количество полюсов со снижением скорости при том же напряжении и увеличением крутящего момента при том же токе. Данную степень свободы в проекте можно сравнить по аналогии с применением механического редуктора и, следовательно, в ряде приложений позволяет использовать безредукторное соединение с некоторыми преимуществами по КПД, габаритным размерам, стоимости. , надежность и точность управления. Это решение было принято в течение нескольких лет в промышленных машинах (например, в производстве бумаги, [14]), в секторе гражданских подъемников (лифты), в очистке воздуха (вентиляторы градирен, [15]) и в некоторые бытовые приборы (в частности стиральные машины).
В проекте, рассмотренном в [15], в качестве конструктивного элемента использован статорный пакет (пластины) без добавления внешнего кожуха. На рис. 6 также показана конструкция статора пластины , где видно внешнее крыло для отвода тепла. Благодаря габаритным размерам, ограниченным по высоте, этот двигатель устанавливается в основании градирни на оси вентилятора, что позволяет избежать прямоугольной передачи и снижения скорости, которые вместо этого необходимы в традиционной конфигурации (с асинхронным двигателем). двигатель).
На рис. 6 также показана конструкция статора пластины , где видно внешнее крыло для отвода тепла. Благодаря габаритным размерам, ограниченным по высоте, этот двигатель устанавливается в основании градирни на оси вентилятора, что позволяет избежать прямоугольной передачи и снижения скорости, которые вместо этого необходимы в традиционной конфигурации (с асинхронным двигателем). двигатель).
Применение
Первые приложения в гражданском секторе синхронных двигателей с постоянными магнитами включают системы кондиционирования из-за важности энергопотребления в этом случае. В холодильной технике и (как промышленной, так и бытовой) постепенно растет использование синхронных двигателей. Кроме того, особый случай представляют циркуляционные насосы для теплоцентралей, которые в настоящее время из соображений экономичности практически полностью базируются на синхронных двигателях с постоянными магнитами с бездатчиковым управлением.
Среди бытовых приборов в стиральных машинах использование этих типов двигателей стало обычным в последние несколько лет. Использование синхронных двигателей вместо асинхронных или универсальных (со щетками) позволило, с одной стороны, уменьшить габариты и количество используемого материала, а с другой стороны, улучшить управляемость, связанную также с принятием таких решений, как механическое прямое соединение. В последнем случае из-за габаритных ограничений и требований к крутящему моменту ротор обычно является внешним, а весь двигатель плоским и большого диаметра (рис. 7).
Рис. 7. Синхронный двигатель с прямым приводом и постоянными магнитами, с внешним ротором (веб-сайт LG).
Деталью производства этого типа машин, используемой также для других конкретных применений, является обмотка на зубце (отдельная обмотка для каждого зубца статора).
В этом типе количество незадействованных медных деталей уменьшено, но становится сложнее проектировать машины с низкой пульсацией крутящего момента. Прямое соединение обеспечивает преимущества также с точки зрения общей работы, облегчая идентификацию нагрузки в баке и ее размещение, в дополнение к контролю скорости.
Прямое соединение обеспечивает преимущества также с точки зрения общей работы, облегчая идентификацию нагрузки в баке и ее размещение, в дополнение к контролю скорости.
Из-за особенностей рабочего цикла стиральных машин, включающего отжим-сушку, важна работа на высокой скорости (выше номинальной). Этот режим называется « дефлюкс », потому что, поскольку напряжение пропорционально расходу и скорости, общий расход уменьшается за счет своевременного управления, чтобы обеспечить работу на более высоких скоростях и фиксированном напряжении. В этом случае синхронные двигатели с внутренними постоянными магнитами являются основными кандидатами, поскольку их доступный крутящий момент не падает внезапно за пределы номинальной скорости.
Сфера применения синхронных двигателей – это лифты , особенно крупногабаритные. В этом случае также были реализованы специальные решения, подобные тому, что на рис. 8, допускающие прямое движение нагрузки (безредукторное).
Рис. 8. Подъемная система для безредукторных подъемников с синхронным двигателем с постоянными магнитами и осевым потоком (веб-сайт Kone).
В данном случае это осевой двигатель, т.е. зазор между статором и ротором (магнитный зазор) пересекают силовые линии, параллельные оси.
Другие конкретные области применения касаются возобновляемых источников (например, энергии ветра) и авионики , где они преследуют цель «Больше электрических самолетов» (замена гидравлических или пневматических приводов). Использование высокоэффективных и высокоплотных двигателей также распространяется в тяговых , включая автомобильный сектор (от велосипедов до тяжелых транспортных средств и рабочих машин), железнодорожный/трамвайный сектор и промышленный сектор (вилочные погрузчики и т.п.).
Библиография
- Уайлд, К. У. Бруннер, «Возможности политики энергоэффективности для систем с электроприводом», Международное энергетическое агентство, Рабочий документ, 2011.

- «Электродвигатели и приводы с регулируемой скоростью. Стандарты и законодательные требования к энергоэффективности низковольтных трехфазных двигателей», ZVEI — Zentralverband Elektrotechnik- und Elektronikindustrie e.V., Division Automation — Electric Drive Systems, Франкфурт, декабрь 2010 г., 2-е издание. .
- «Повышение рентабельности промышленности с помощью энергоэффективных приводов и двигателей», брошюра ABB, 2016 г.
- Вагати, «Решение синхронного реактивного сопротивления: новая альтернатива в приводах переменного тока», 20-я Международная конференция по промышленной электронике, управлению и контрольно-измерительным приборам, 1994 г. IECON ’94., Болонья, 1994 г., стр. 1-13, том 1.
- Липо, Т. А., «Синхронные реактивные машины — жизнеспособная альтернатива приводам переменного тока». Консорциум Wisconsin Electric Machines and Power Electronics Consortium, Исследовательский отчет, 1991.
- «Низковольтные двигатели с технологическими характеристиками в соответствии с EU MEPS», каталог АББ, октябрь 2014 г.
- «Редкие земли», S. Геологическая служба, сводки по минеральным товарам, январь 2016 г.
- Гульельми, Б. Боаццо, Э. Армандо, Г. Пеллегрино и А. Вагати, «Минимизация магнита в конструкции двигателя IPM-PMASR для применения в широком диапазоне скоростей», 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, 2011, стр. 4201-4207.
- «Технологии двигателей для повышения эффективности в приложениях — обзор тенденций и приложений», Danfoss Power Electronics — Danfoss VLT drive PE-MSMBM, ноябрь 2014 г.
- Н. Бедетти, С. Каллигаро; Р. Петрелла, «Самоидентификация характеристик потока в состоянии покоя для синхронных реактивных машин с использованием новой функции аппроксимации насыщения и множественной линейной регрессии», в IEEE Transactions on Industry Applications, vol. 52, нет. 4, стр. 3083-3092, июль-август. 2016.
- Н. Бедетти, С. Каллигаро; Р. Петрелла, «Самостоятельный ввод в эксплуатацию компенсации простоя инвертора с помощью множественной линейной регрессии на основе физической модели», Конгресс и выставка IEEE по преобразованию энергии (ECCE), 2014 г. , том, №, стр. 242-249., 14-18 сентября 2014 г.
- Н. Бедетти, С. Каллигаро; Р. Петрелла, «Аналитический расчет контура регулирования напряжения с ослаблением потока в приводах IPMSM», Конгресс и выставка IEEE по преобразованию энергии (ECCE), 2015 г., том, №, стр. 6145-6152, 20-24 сентября 2015 г.
- Н. Бедетти, С. Каллигаро; Р. Петрелла, «Проблемы проектирования и анализ ошибок оценки наблюдателя положения и скорости на основе противо-ЭДС для синхронных двигателей SPM», в IEEE Journal of Emerging and Selected Topics in Power Electronics, том 2, № 2, стр. 159-170, июнь 2014 г.
- S.A. Odhano, P. Giangrande, RI Bojoi и C. Gerada, «Самостоятельный ввод в эксплуатацию внутренних синхронных двигателей с постоянными магнитами и высокочастотной подачей тока», в IEEE Transactions on Industry Applications, vol. 50, нет. 5, стр. 3295-3303, сент.-окт. 2014.
- Велин, К.-Дж. Фриман, «Новая система прямого привода открывает новую эру для бумагоделательных машин», Paper and Timber, Vol. 83/No. 5, 2001.
- МакЭлвин, К. Лайлс, Б. Мартин и В. Вассерман, «Надежность приводов градирен: повышение эффективности с помощью новой моторной технологии», в журнале IEEE Industry Applications Magazine, vol. 18, нет. 6, стр. 12-19, нояб.-дек. 2012.
 , том, №, стр. 242-249., 14-18 сентября 2014 г.
, том, №, стр. 242-249., 14-18 сентября 2014 г.  83/No. 5, 2001.
83/No. 5, 2001. Курсы PDH онлайн. PDH для профессиональных инженеров. ПДХ Инжиниринг.
«Мне нравится широта ваших курсов HVAC; не только экологические курсы или курсы по энергосбережению
.»
Рассел Бейли, ЧП
Нью-Йорк
«Это укрепило мои текущие знания и научило меня еще нескольким новым вещам,
познакомив меня с новыми источниками
информации.»
Stephen Deduck, P.E.
Нью-Джерси
«Материал был очень информативным и организованным. Я многому научился, и они
очень быстро отвечали на вопросы.
Это было на высшем уровне. Буду использовать
Буду использовать
снова. Спасибо».0160
«Веб-сайт прост в использовании. Хорошо организован. Я действительно буду пользоваться вашими услугами снова.
Я передам название вашей компании
другим сотрудникам.»
Рой Пфлейдерер, ЧП
Нью-Йорк
«Справочный материал был превосходным, и курс был очень информативным, особенно потому, что я думал, что уже знаком
с деталями Kansas
Авария в City Hyatt.»
Майкл Морган, ЧП
Техас
«Мне очень нравится ваша бизнес-модель. Мне нравится, что я могу просмотреть текст перед покупкой. Я обнаружил, что класс
Информативный и полезный
В моей работе.
William Senkevich, P.E.
Floris
. познавательный. Вы
— лучший я обнаружил ».
Рассел Смит, стр.
материала.»
Хесус Сьерра, Ч.П. На самом деле
человек учится больше
от неудач. «
John Scondras, P.E.
Pennsylvania 9017
Isless Well Malidaill Mallion 9017
.
way of teaching.»
Jack Lundberg, P.E.
Wisconsin
«I am very impressed with the way you present the courses; т. е. позволяя
student to review the course
material before paying and
receiving the quiz.»
Arvin Swanger, P.E.
Virginia
«Thanks for offering all these great курсы. Я, конечно, многому научился и
получил огромное удовольствие».0002 «Я очень доволен предлагаемыми курсами, качеством содержания материалов и простотой поиска
онлайн-курсов
. »
»
Уильям Валериоти, ЧП
Техас
«Этот материал в значительной степени оправдал мои ожидания. Курс был прост для понимания. Фотографии в основном хорошо иллюстрировали
обсуждаемые темы.»
Майкл Райан, ЧП
Пенсильвания
«Именно то, что я искал. Нужен 1 балл по этике, и я нашел его здесь.»
Джеральд Нотт, ЧП
Нью-Джерси
«Это был мой первый онлайн-опыт получения необходимых кредитов PDH. Это было
информативно, выгодно и экономично.
Я очень рекомендую это
для всех инженеров. «
Джеймс Шурелл, P.E.
OHIO
» I PRACTION «I PRACTIAL WARTION». , и
не основаны на какой-то неясной секции
законов, которые не применяются
к «нормальной практике». 0017
0017
Марк Каноник, ЧП
Нью-Йорк
«Большой опыт! Я многому научился, чтобы взять его с собой в свою медицинскую организацию
».
Иван Харлан, ЧП
Теннесси
«Материал курса имеет хорошее содержание, не слишком математический, с хорошим акцентом на практическое применение технологий».
Юджин Бойл, ЧП
California
«This was a very pleasant experience. The topic was interesting and well presented,
and the online format was very
accessible and easy to
use. Many Благодарность.»
Патрисия Адамс, ЧП
Канзас
«Отличный способ добиться соответствия непрерывному обучению физкультуры в рамках временных ограничений лицензиата».
Джозеф Фриссора, ЧП
Нью-Джерси
«Должен признаться, я действительно многому научился. Это помогает распечатать тест во время просмотра текстового материала. предоставлены фактические случаи
Это помогает распечатать тест во время просмотра текстового материала. предоставлены фактические случаи
.»
Жаклин Брукс, ЧП
Флорида
«Общие ошибки ADA в дизайне объектов очень полезно. Исследование
Требовалось в
Документ , но .
Гарольд Катлер, ЧП
Массачусетс
«Это было эффективное использование моего времени. Спасибо за разнообразие выбора
в инженерии дорожного движения, который мне нужен
для выполнения требований
Сертификация PTOE.
Joseph Gilroy, P.E.
9000 2 Joseph Gilroy, P.E.
9000 2 Joseph Gilroy, p. способ заработать CEU для моих требований PG в штате Делавэр. До сих пор все курсы, которые я посещал, были отличными.
Надеюсь увидеть больше 40%
Курсы с дисконтированием. «
«
Кристина Никалас, с.е. дополнительные
курсы. Процесс прост, и
намного эффективнее, чем
необходимость путешествовать.0160
Айдахо
«Услуги, предоставляемые CEDengineering, очень полезны для инженеров-профессионалов
, которые могут получить блоки PDH
в любое время. Очень удобно».
Пол Абелла, ЧП
Аризона
«Пока все было отлично! Будучи матерью двоих детей, я не так много
времени, чтобы исследовать, где
получить мои кредиты от.»
Кристен Фаррелл, P.E.
Висконсин
2 90 «Это было очень познавательно и познавательно. Легко понять с иллюстрациями
и графиками; определенно
облегчает впитывание всех
теорий. »
»
Виктор Окампо, P.Eng.
Alberta, Canada
«A good review of semiconductor principles. I enjoyed going through the course at
my own pace during my morning
subway commute
to work .»
Клиффорд Гринблатт, ЧП
Мэриленд
«Просто найти интересные курсы, скачать документы и пройти
викторина. I would highly recommend
you to any PE needing
CE units.»
Mark Hardcastle, P.E.
Missouri
«Very good selection тем во многих областях техники».Missouri
«У меня пережил вещи, которые я забыл. Я также рад выиграть .
на 40%.»
Конрадо Касем, ЧП
Теннесси
«Отличный курс по разумной цене. Я буду пользоваться вашими услугами в будущем».
Я буду пользоваться вашими услугами в будущем».
Чарльз Флейшер, ЧП
Нью-Йорк
«Это был хороший тест, и я фактически проверил, что я прочитал кодексы профессиональной этики
и правила Нью-Мексико
».
Брун Гильберт, ЧП
Калифорния
«Мне очень понравились занятия. Они стоили времени и усилий.»
Дэвид Рейнольдс, ЧП
Канзас
«Очень доволен качеством тестовых документов. Воспользуюсь CEDengineerng
, когда потребуется дополнительная сертификация
».
Томас Каппеллин, ЧП
Иллинойс
«У меня истек срок действия курса, но вы все равно выполнили обязательство и поставили
me what I paid for — much
appreciated!»
Jeff Hanslik, P.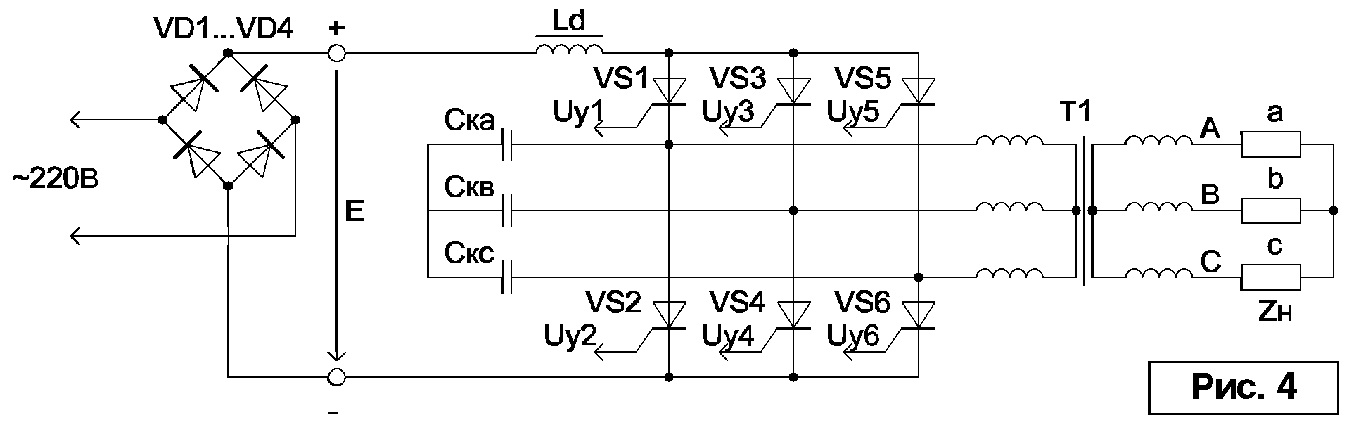 E.
E.
Oklahoma
«CEDengineering provides convenient, economical and relevant courses
для инженера».0160
Хорошо расположено. «
Глен Шварц, P.E.
New Jersey
«. Воспитание. Используйте Mardessons 9017 9002 «.
для дизайна дерева.»
Брайан Адамс, ЧП
Миннесота
0160
Роберт Велнер, ЧП
New York
«I had a great experience taking the Coastal Construction – Designing
the Building course and
highly recommend it.»
Денис Солано, ЧП
Флорида
«Очень понятный, хорошо организованный веб-сайт.0160
хорошо подготовлено. Мне нравится возможность загрузить учебный материал на
Мне нравится возможность загрузить учебный материал на
Обзор, где бы ни был и
. Сохраняйте широкий выбор тем на выбор».
Уильям Бараттино, ЧП
Вирджиния
«Процесс прямой, никакой чепухи. Хороший опыт.»
Тайрон Бааш, ЧП
Иллинойс
«Вопросы на экзамене были наводящими и демонстрировали понимание
материала. Тщательный
and comprehensive.»
Michael Tobin, P.E.
Arizona
«This is my second course and I liked what the course offered to me that
would help in моя линия
работы. Я обязательно воспользуюсь этим сайтом снова.»
Анджела Уотсон, ЧП
Монтана
«Легко выполнить. Нет путаницы при подходе к сдаче теста или записи сертификата.»
Нет путаницы при подходе к сдаче теста или записи сертификата.»
Кеннет Пейдж, ЧП
Мэриленд
«Это был отличный источник информации о нагревании воды с помощью солнечной энергии.
Луан Мане, ЧП
Conneticut
«Мне нравится подход, позволяющий зарегистрироваться и иметь возможность читать материалы в автономном режиме, а затем
вернуться, чтобы пройти тест.»
Алекс Млсна, ЧП
Индиана
«Я оценил количество информации, предоставленной для класса. Я знаю
Это вся информация, которую я могу
Использование в реальных .
курс.»Нью-Джерси
«Веб-сайт прост в использовании, вы можете скачать материал для изучения, затем вернуться
и пройти викторину.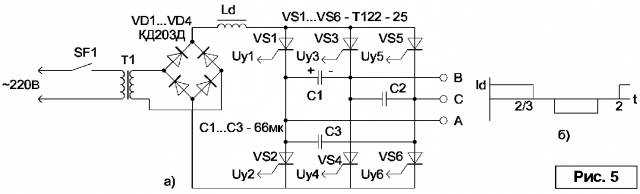 Очень
Очень
удобно
удобно 102 107 9009 График .»
Майкл Гладд, ЧП
Грузия
«Спасибо за хорошие курсы на протяжении многих лет.»
Деннис Фундзак, ЧП
Огайо
«Очень легко зарегистрироваться, получить доступ к курсу, пройти тест и распечатать сертификат PDH
. Спасибо, что сделали этот процесс простым.»
Фред Шайбе, ЧП
Висконсин
«Положительный опыт. Быстро нашел подходящий мне курс и закончил его
Один час PDH в
Один час. «
Стив Торкильдсон, P.E.
South Carolina
» I Likeed. Способный к Dockers
«I Likeed. Способный к Dockers
» I Liked. и пригодность, прежде чем
иметь для оплаты
материалов.
Добавить комментарий